

Multi-robot path coordination method and system
A multi-robot, coordination method technology, applied in control/regulation systems, instruments, motor vehicles, etc., can solve problems such as distribution space congestion, reduce logistics distribution efficiency, robot collisions, etc., to avoid collision accidents, eliminate accidents, The effect of improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to make the object, technical solution and advantages of the present invention clearer, the technical solution of the present invention will be described in detail below in conjunction with the drawings in the embodiments of the present invention.
[0039] First introduce the multi-robot path coordination method of the present invention:
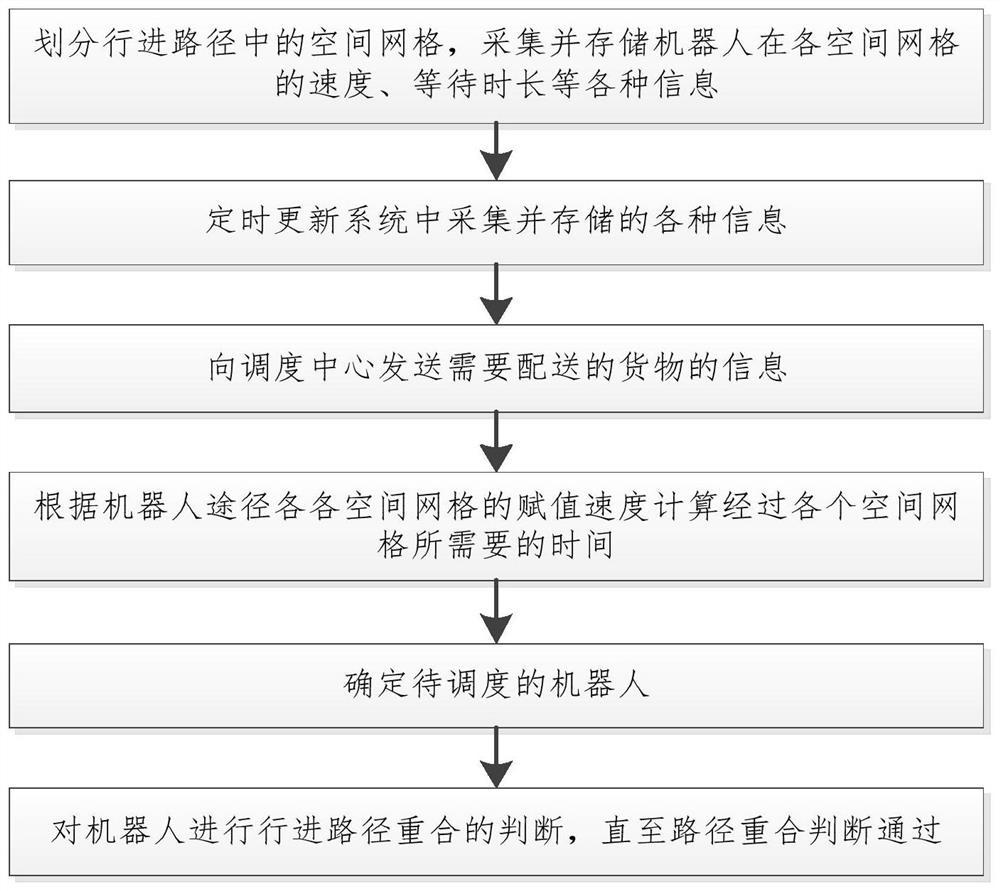
[0040] Such asfigure 1 As shown, the present invention discloses a multi-robot path coordination method, which mainly includes the following steps:
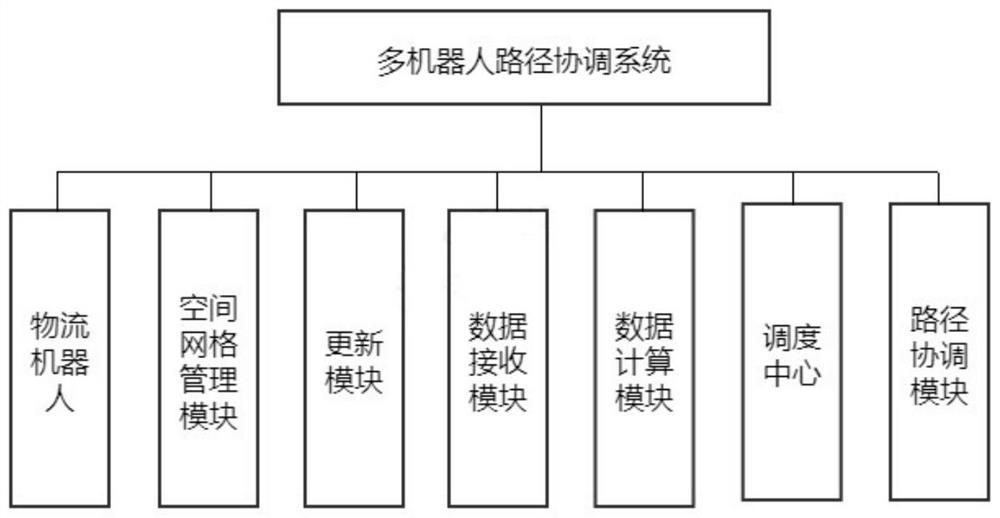
[0041] The spatial grid management module divides the space area where the logistics robot can be used as the travel path in office buildings, parks, communities and other working spaces into various spatial grids, and collects and stores the travel speed of the logistics robot in different spatial grids, etc. Data, and for a special spatial grid, such as elevators, access gates, etc., collect and store data such as the elevator waiting time and gate entry and exit waiting time ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More