

Method for calibrating absolute precision of industrial robot based on PMPSD
An industrial robot, absolute precision technology, applied in the field of robot calibration, can solve the problem of not being able to accurately identify the geometric parameter error of industrial robots, and achieve the effect of saving calibration time, avoiding errors, and avoiding PSD feedback control strategies
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the embodiments and with reference to the accompanying drawings.
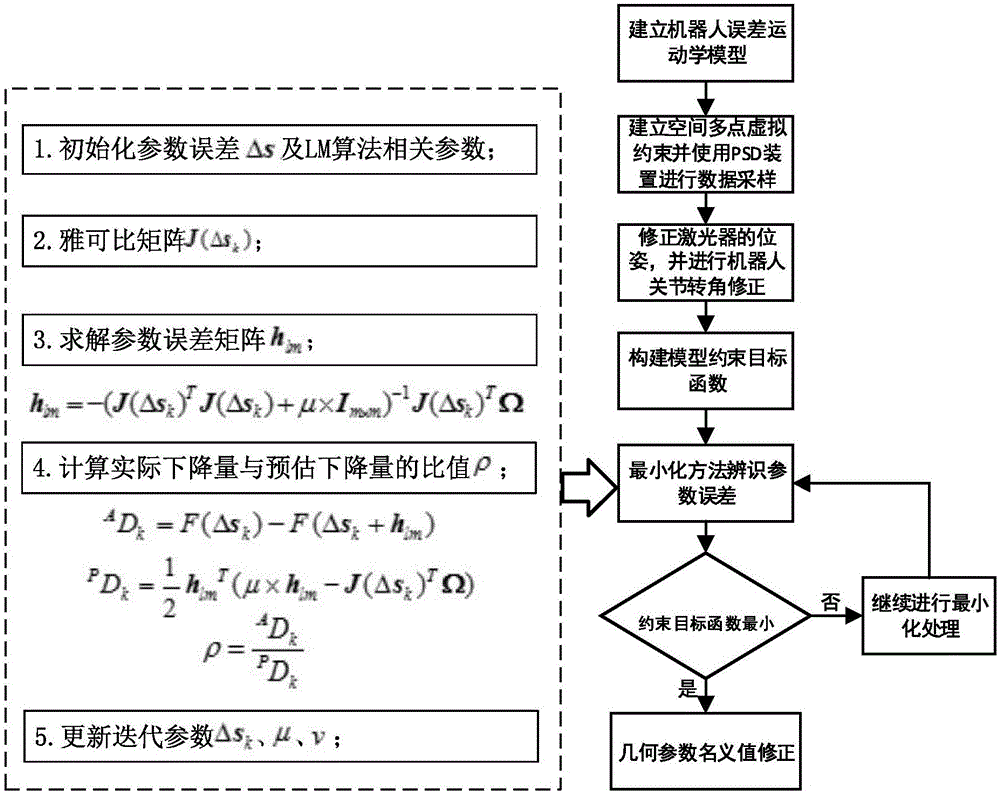
[0024] A PMPSD-based absolute precision calibration method for industrial robots, the operation flow chart is as follows image 3 As shown, the method includes the following steps:
[0025] The first step: establish the robot error kinematics model, including the following steps:
[0026] Step (1), use the D-H rule to build a robot error kinematics model.
[0027] In the D-H rule, the kinematic relationship between two adjacent bars is:
[0028]
[0029] In the formula, is the kinematic relationship between link i and link i-1, where a i is the connecting rod length, Δa i is the connecting rod length error, d i is the connecting rod offset distance, Δd i is the connecting rod offset error, α i is the joint tors...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More