

Three-dimensional point cloud road boundary automatic extraction method
A 3D point cloud and automatic extraction technology, applied in the field of point cloud processing, can solve the problems of road surface loss details and difficulties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
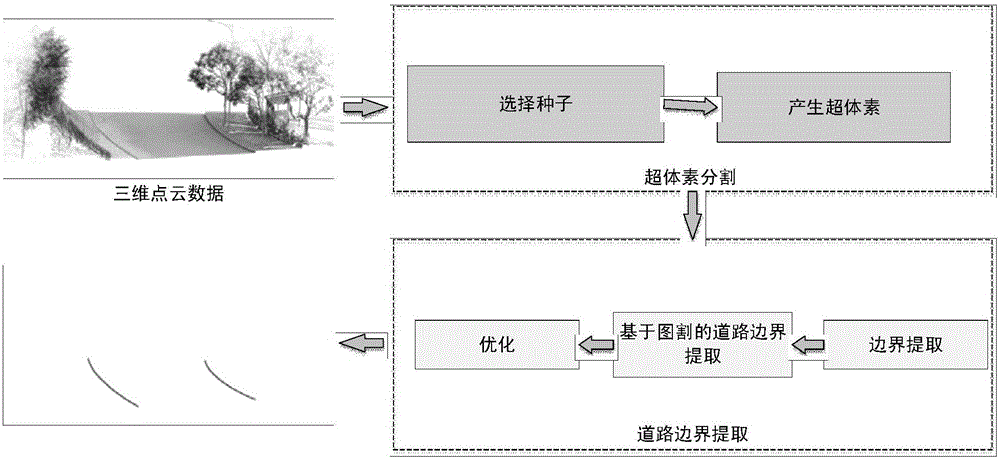
[0063] The specific implementation scheme of the road boundary extraction method based on the vehicle-mounted laser scanning point cloud data proposed by the present invention is as follows (the general technical scheme flow can be seen in figure 1 ):
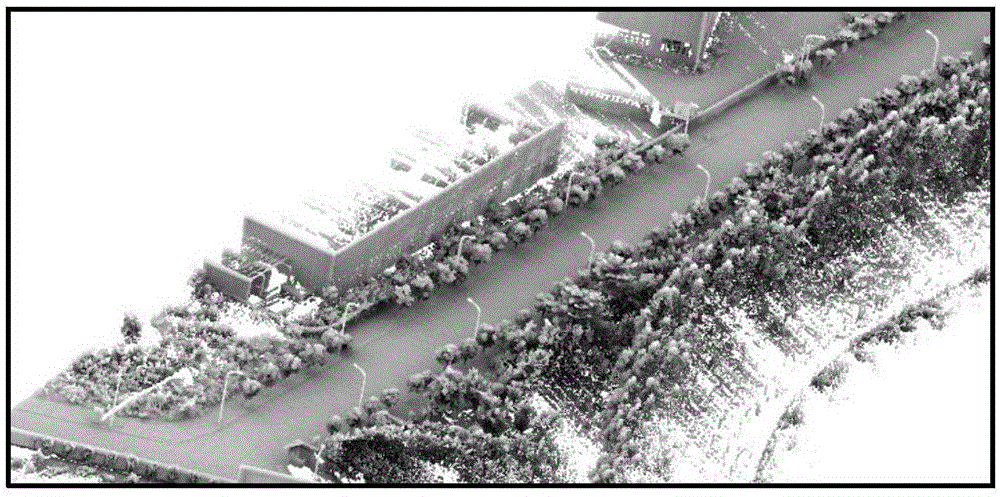
[0064] S1, for the obtained entire three-dimensional point cloud data set P, screen the seed points to perform super-voxel division (the original point cloud data of the present embodiment can be seen figure 2 );
[0065] Supervoxel division refers to gathering adjacent points with the same properties into a super point to reduce the complexity of data processing;
[0066] S11. Solve the fitting plane T p (p i ):
[0067] For each input point p of the entire 3D point cloud dataset P i , its tangent plane Tp(p i ) can be represented by its center point o i and the normal vector n l composed of two-tuples, namely
[0068]
[0069] From any point p to Tp in three-dimensional space (p i ) can be expressed as
[0070]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More