

Driverless car, control method and control device for driverless car
A technology of unmanned vehicles and control methods, which is applied in the field of unmanned vehicles and can solve problems such as inability to park safely
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] In order to make the technical problems, technical solutions and beneficial effects solved by the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
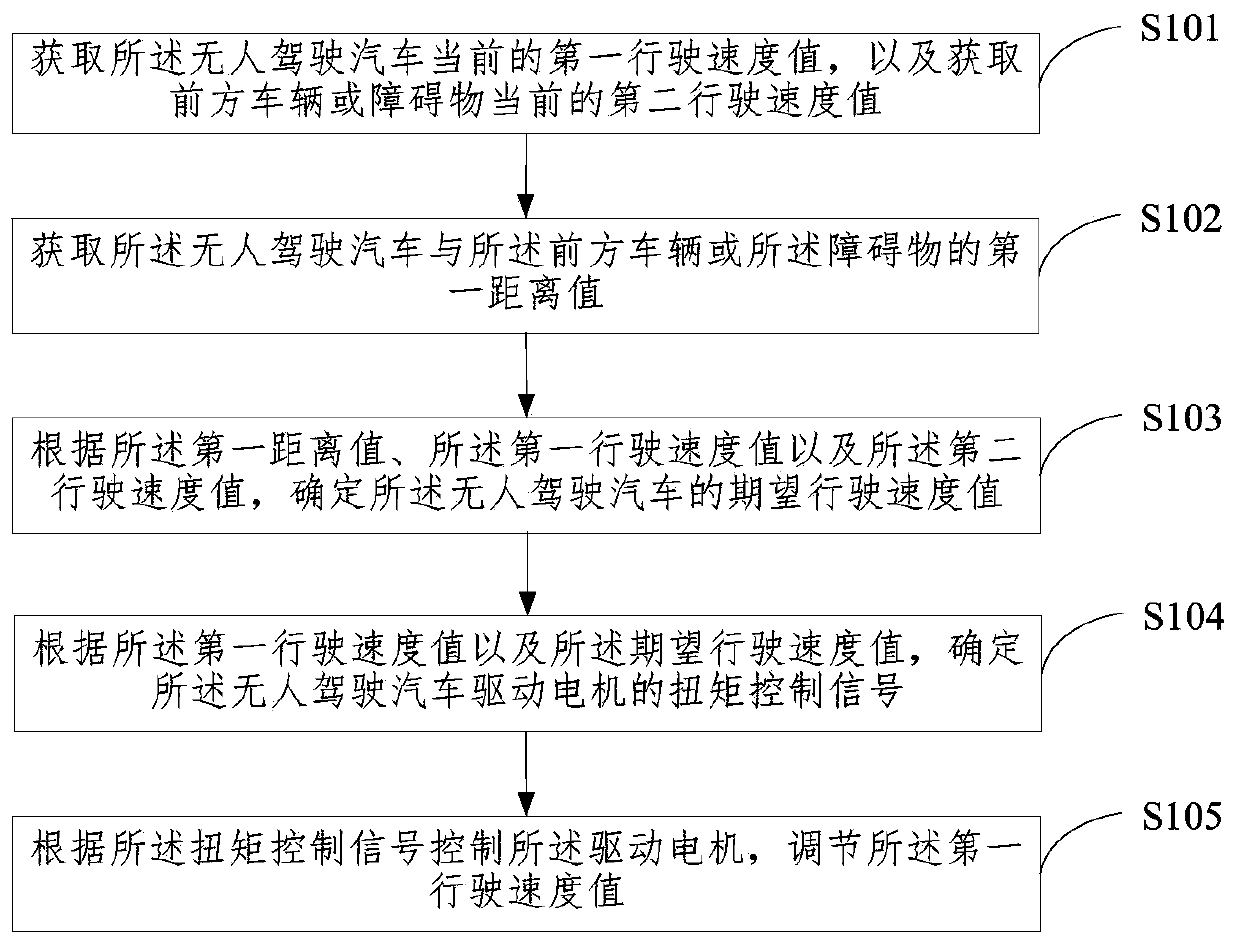
[0066] See figure 1 , figure 1 It is a schematic flowchart of a control method for an unmanned vehicle provided by an embodiment of the present invention. In this embodiment, the control method of the unmanned vehicle is executed by the unmanned vehicle. Driverless cars can be electric driverless cars or new energy driverless cars. Such as figure 1 The control method of the shown driverless car may include the following steps:
[0067] S101: Obtain the current first driving speed value of the driverless car, and obtain the current second driving speed value of the vehicle or obstacle in front.
[0068] The driverless car can detect the current first driving speed value through the vehicle-mounted speed measuring dev...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More