

Residual echo estimating method and device
An echo and estimated value technology, which is applied in the field of residual echo estimation methods and devices, and can solve problems such as elimination, speech distortion, and impact on the sense of hearing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
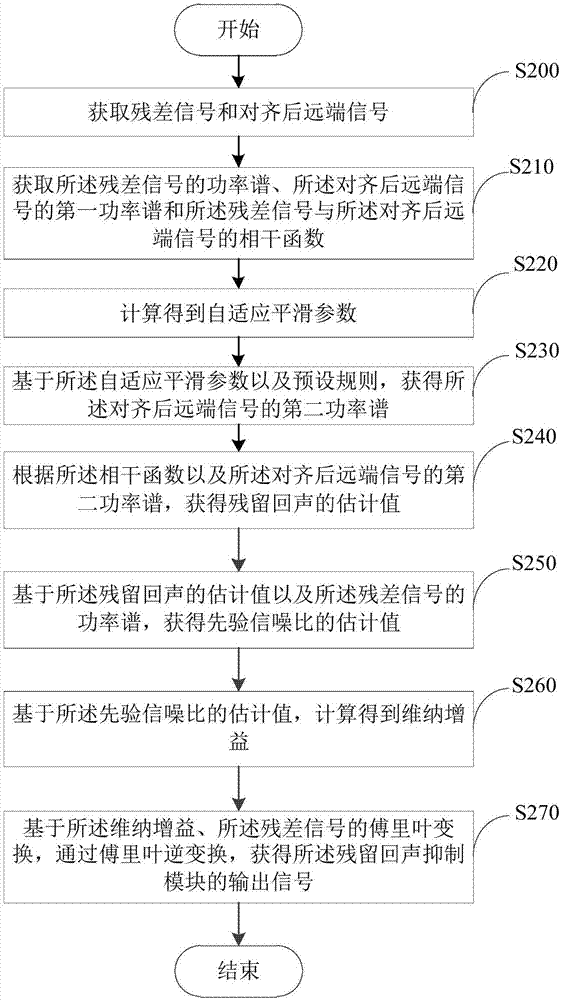
[0021] Please refer to figure 2 , an embodiment of the present invention provides a residual echo estimation method, the method comprising:
[0022] Step S200: Obtain the residual signal and the aligned remote signal;
[0023] Step S210: Obtain the power spectrum of the residual signal, the first power spectrum of the aligned remote signal, and the coherence function between the residual signal and the aligned remote signal;
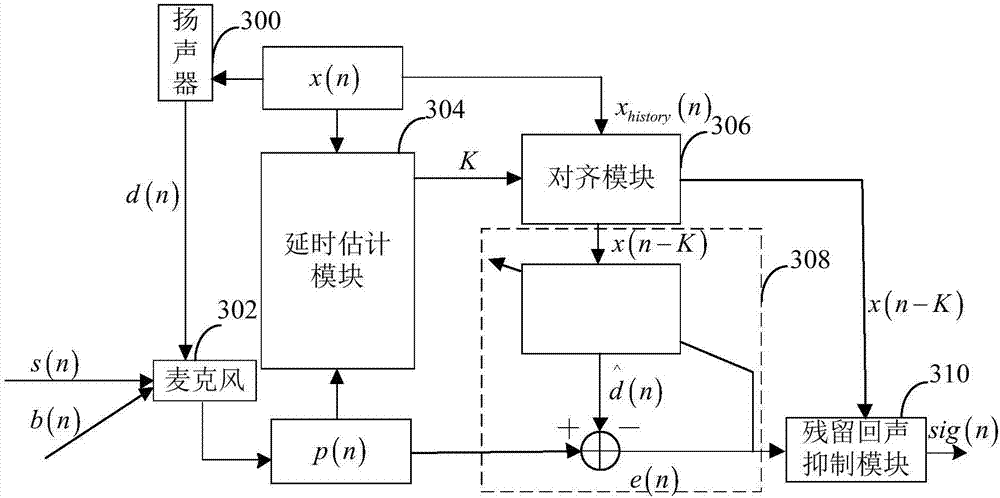
[0024] In the actual speaker and microphone loop system, due to factors such as the nonlinear frequency response of the power amplifier, the nonlinearity of speaker vibration, and the nonlinear frequency response of the microphone, it is difficult to eliminate the echo with linear echo cancellation. Residual echo suppression is used to eliminate Residual echo.
[0025] Residual echo has the characteristics of fast change speed and large energy dynamic range. The residual echo suppression module of the existing echo cancellation technology generally h...
no. 2 example
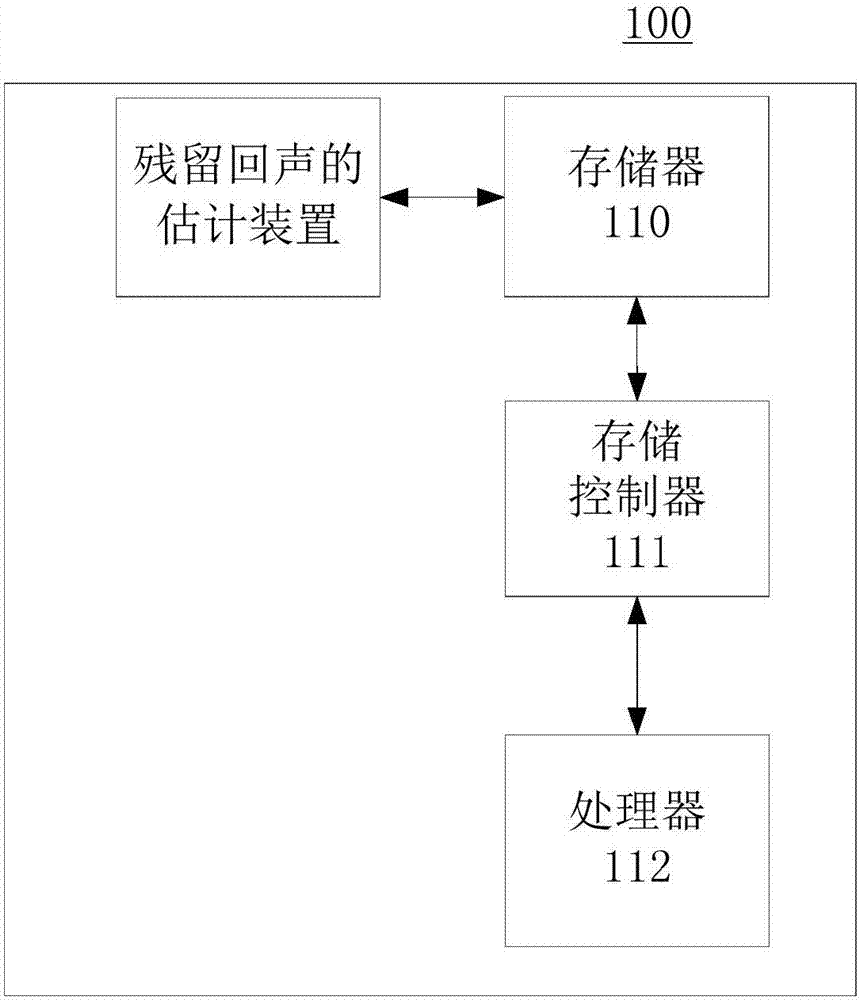
[0056] Please refer to Figure 4 , the embodiment of the present invention provides a residual echo estimation device 400, the device 400 includes:
[0057] The first acquiring unit 410 is configured to acquire the residual signal and the aligned remote signal.
[0058] The second acquiring unit 420 is configured to acquire the power spectrum of the residual signal, the first power spectrum of the aligned remote signal, and a coherence function between the residual signal and the aligned remote signal.
[0059] Specifically, the second acquiring unit 420 is configured to:
[0060] Based on the following formula (1):
[0061]
[0062] Among them, e is the residual signal, m is the frame number, n is the discrete time, ω is the discrete frequency, win is windowing, FFT is the fast discrete Fourier transform, L fft is the length of the fast discrete Fourier transform, L shift Indicates the frame shift, K is the estimated delay, x is the remote signal after alignment, S ee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More