

Synchronous map construction and positioning system and method applied to service robots
A service robot and map construction technology, applied in control/adjustment system, radio wave measurement system, two-dimensional position/channel control, etc., can solve the problems of small application range and high cost, and achieve low cost, simple structure and reliability sex high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
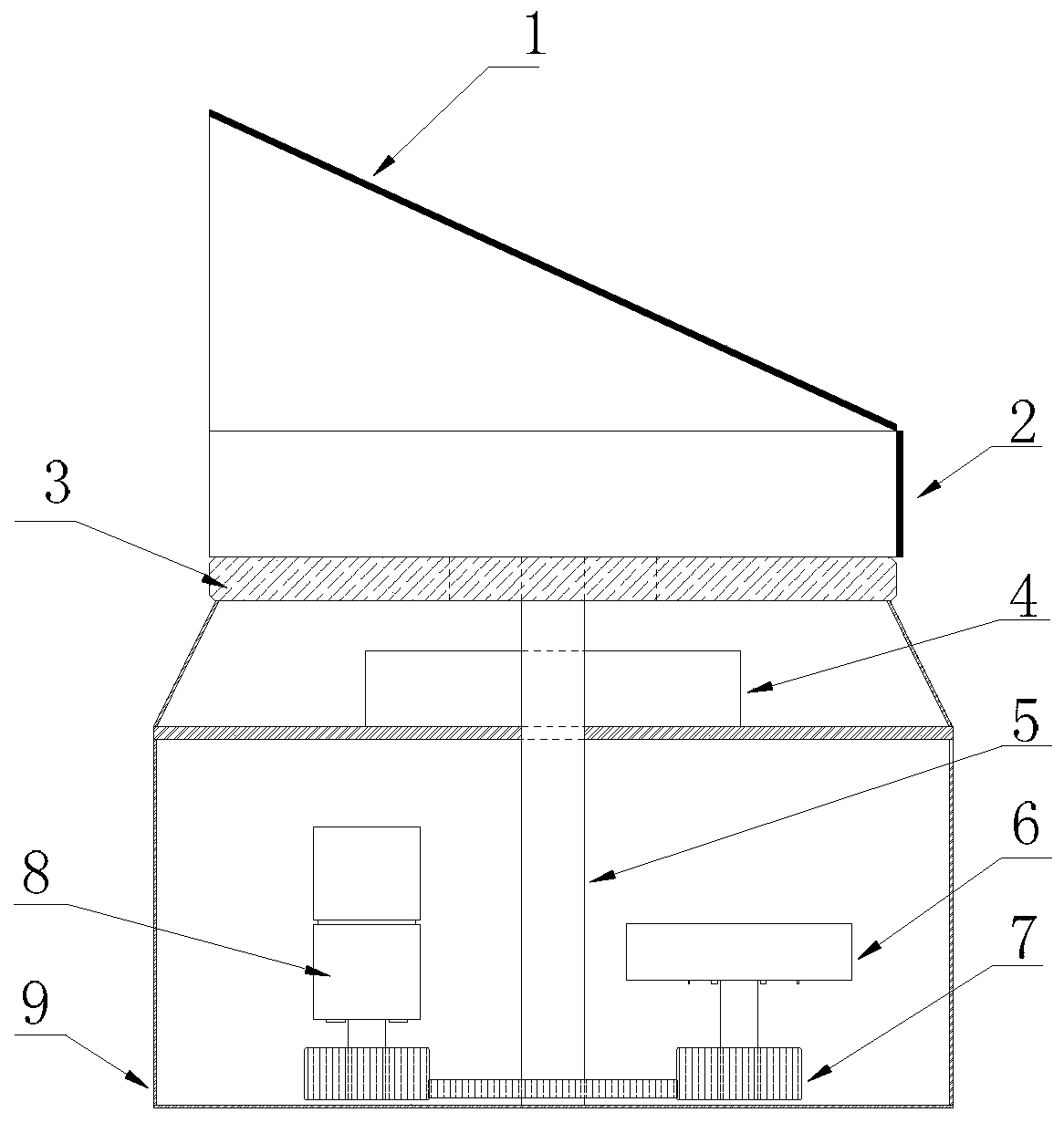
[0027] Specific implementation mode 1. Combination Figure 1 to Figure 3 Describe this embodiment. The synchronous map construction and positioning system applied to service robots described in this embodiment includes 3D laser radar 1, 2D laser radar 2, transmission bearing 3, board card 4, rotating spindle 5, angle detection Encoder 6, gear transmission group 7, driving motor 8 and base 9;
[0028] The lower part of the base 9 is a cylinder with a hollow structure, and the upper part is a hollow truncated cone, and the truncated cone is a structure with upper and lower openings;
[0029] The gear transmission group 7 includes three gears, and the three gears are arranged on the bottom of the base 9, and the three gears are sequentially engaged, and the three gears are respectively sleeved on the outside of the rotating shaft of the driving motor 8 and on the side of the rotating main shaft 5. The outer side and the outer side of the transmission shaft fixed on the lower sid...
specific Embodiment approach 2
[0039] Embodiment 2. This embodiment is a further description of the synchronous map construction and positioning system applied to service robots described in Embodiment 1. The gear and angle detection code set on the outside of the rotating shaft of the drive motor 8 The gear ratio on the outside of the transmission shaft fixed on the lower side of the device 6 is 1:1.
specific Embodiment approach 3
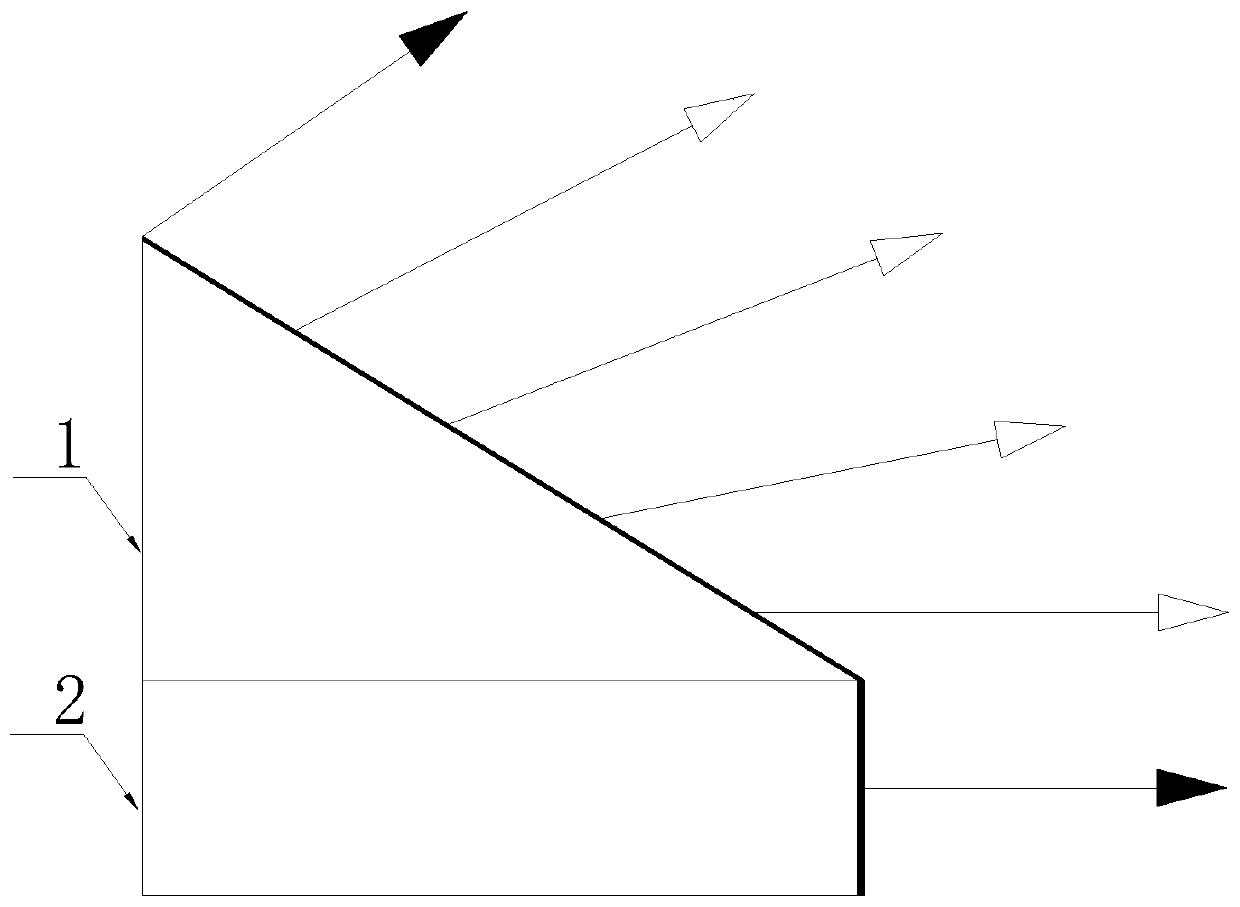
[0040] Embodiment 3. This embodiment is a further description of the synchronous map construction and positioning system applied to service robots described in Embodiment 1 or 2. The 3D laser radar 1 includes a surface lens, a linear laser transmitter, and a CMOS sensor. elements and polarizers;
[0041] The surface lens is embedded in the frustum-shaped structure at the top of the base 9, and the linear laser transmitter, CMOS photosensitive element and polarizer are all arranged in the frustum-shaped structure of the base 9;
[0042] The laser signal of the linear laser transmitter is transmitted to the environment rotated by the 3D laser radar 1 through the surface lens, and the reflected light after the laser signal of the linear laser transmitter encounters an obstacle is incident on the polarizer through the surface lens again, and the reflected light After passing through a polarizer, it is incident on the photosensitive surface of the CMOS photosensitive element, and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More