

TLD-based variable-scale target tracking method suitable for UAVs
A target tracking and target technology, applied in the field of computer vision and image processing, to achieve the effect of ensuring stability and high operating efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
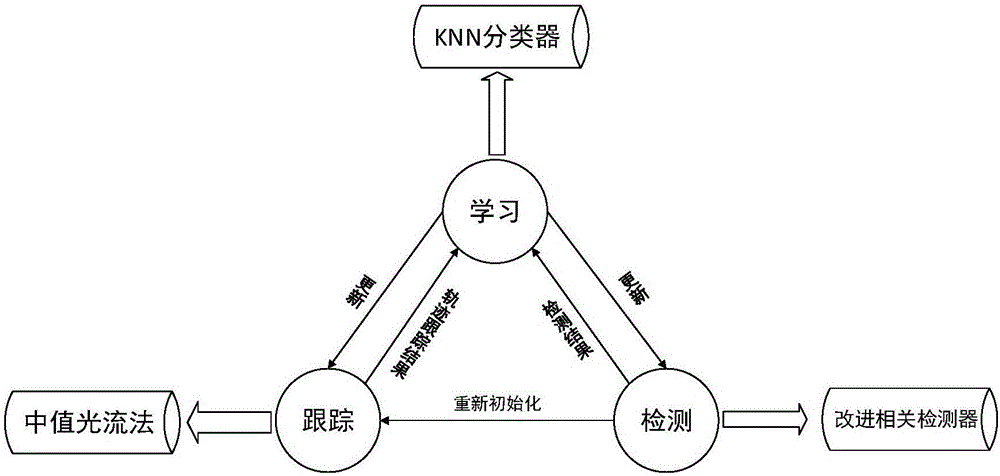
[0062] A kind of target tracking method applicable to unmanned aerial vehicle based on TLD, described target tracking method is based on TLD algorithm, and described TLD algorithm comprises tracker, detector and learner; Described target tracking method comprises the following steps:
[0063] (1) Initialize tracker, detector and learner;
[0064] (2) The tracker generates a series of points to be tracked in the image, and first performs a pyramid optical flow tracking;
[0065] After the target tracking point is generated, the current frame is used as the initial frame, and the reverse tracking is performed;
[0066] Take the mean value of the position deviation between the position of all tracking points and the original tracking point as middleError, if the deviation between the position of the tracking point and the original tracking point>middleError, it is considered that the tracking is inaccurate, and the tracking points with accurate tracking are combined together, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More