

Positioning and navigation method for remote control ship by means of targets after loss of lock of GPS
A technology of positioning navigation and target method, which is applied in the field of navigation, can solve the problems of inertial navigation positioning time drift, difficulty in meeting the positioning accuracy requirements of survey-type remote control ships, and restrict the flexibility of road sign layout, so as to achieve the effect of improving the recognition rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0018] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, so as to define the protection scope of the present invention more clearly.
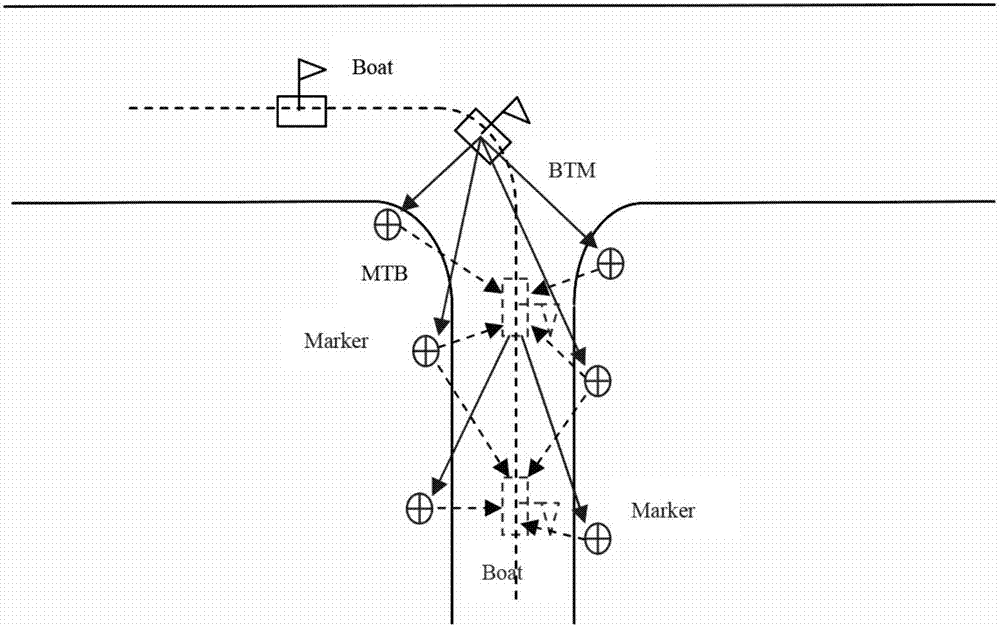
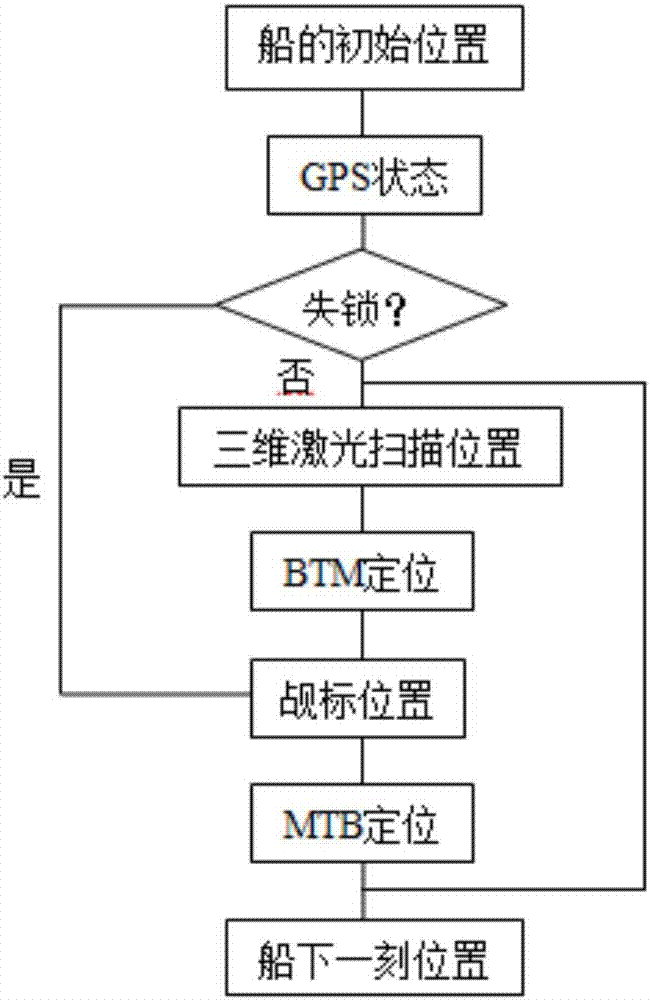
[0019] See attached Figure 1-3 As shown, a kind of target method positioning and navigation method used for remote control ship after GPS loses lock of the present embodiment, its steps are:
[0020] (1). Targets are continuously and freely arranged in areas with severe occlusion on both sides of the river revetment, but it is necessary to ensure that there are at least three targets within the measuring range of the laser scanning equipment when the remote control survey ship enters the area;
[0021] (2). After the target is laid out, the remote-controlled survey ship starts to work. On the river surface with a wide view, that is, when the GPS...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More