

Hand-eye system self-calibration method based on active visual sense
A hand-eye and relationship technology, which is applied in the field of hand-eye system self-calibration based on active vision, and can solve the problem of not involving camera internal parameter matrix and so on.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
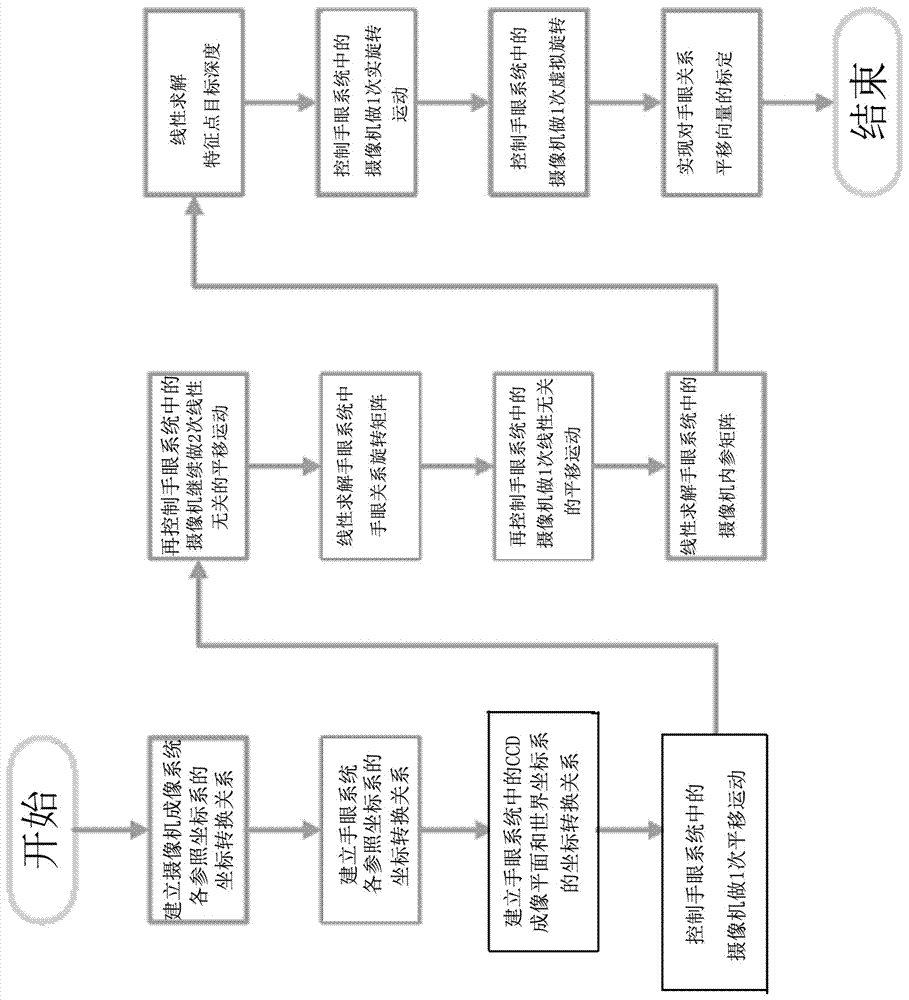
[0059] Refer to attached Figure 1-7 , the inventive method comprises the steps:
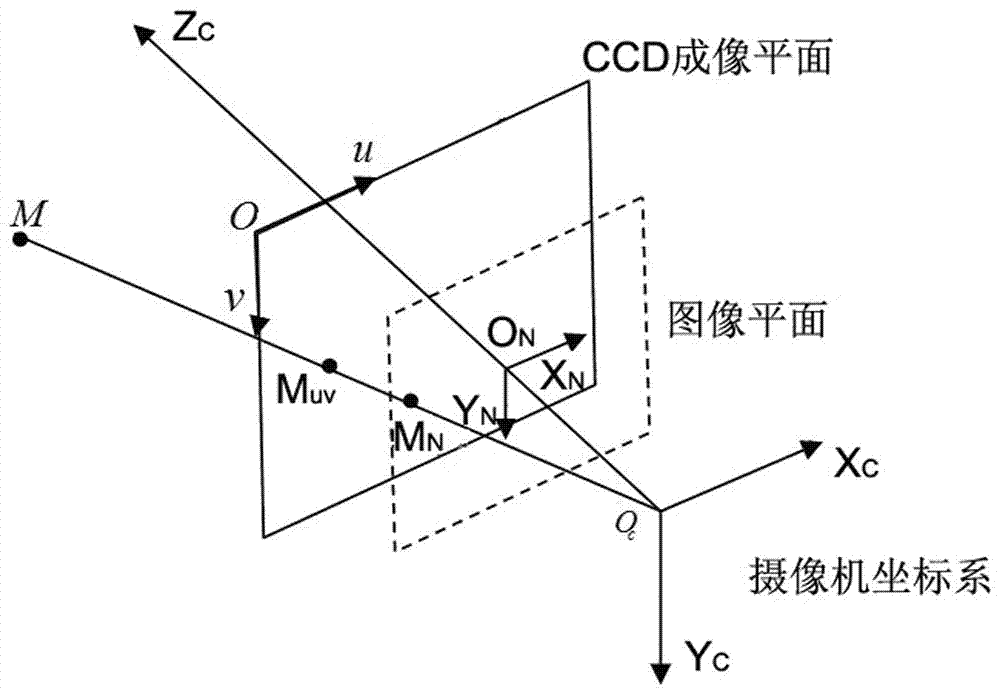
[0060] (1) Establish the coordinate transformation relationship of each reference coordinate system of the camera imaging system, such as figure 2 shown;
[0061] (1-1) Establish each reference coordinate system in the camera imaging system: the coordinates of the imaging point of the feature point M in the CCD imaging plane O-uv are , at the image plane O N -X N Y N The coordinates of the imaging point in are , in the camera coordinate system O C -X C Y C Z C The coordinates in are .
[0062] (1-2) Establish a five-parameter model of the camera internal parameter matrix ,in Indicates the scale factor of the x-axis of the image plane, Indicates the scale factor of the y-axis of the image plane, represents the distortion factor, is the origin of the CCD imaging plane.
[0063] (1-3) Establish CCD imaging plane O-uv and image plane O in the camera imaging system N -X N ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More