

Mobile robot continuous control method based on non-map motion planner
A motion planner, mobile robot technology, applied in non-electric variable control, two-dimensional position/channel control, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present invention will be further described in detail below in conjunction with the drawings and specific embodiments.
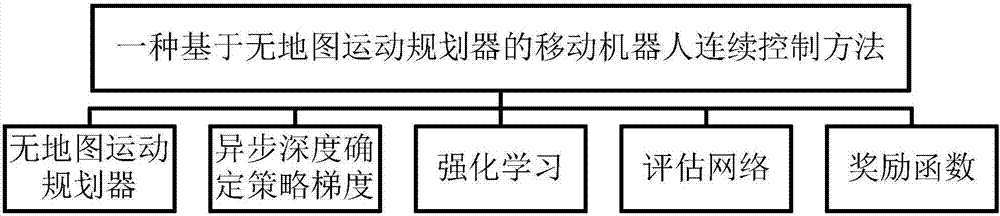
[0030] figure 1 It is a system frame diagram of a continuous control method for a mobile robot based on a mapless motion planner in the present invention. Mainly including map-free motion planner, asynchronous deep determination policy gradient, reinforcement learning, evaluation network and reward function.
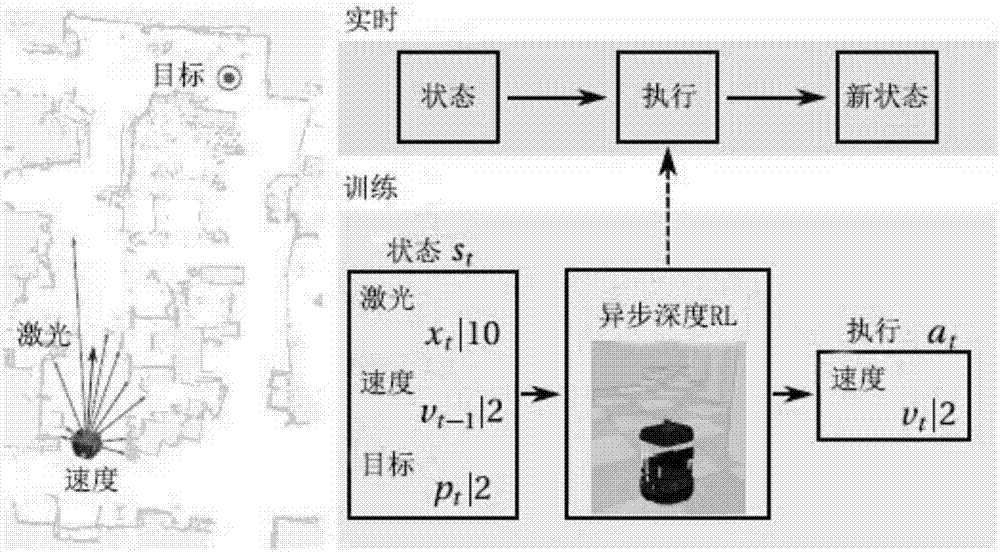
[0031] A continuous control method for mobile robots based on a mapless motion planner, which only extracts 10-dimensional ranging results and target relative information as a reference, and the mapless motion planner is trained end-to-end from scratch through an asynchronous deep reinforcement learning method, and can directly output Continuous linear and angular velocity.
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More