

Bionic lower limb exoskeleton robot based on rope drive
A technology of exoskeleton robots and lower limbs, which is applied in the direction of devices that help people walk, manipulators, program-controlled manipulators, etc. It can solve the problems of inability to synchronize human knee joints, uncomfortable wearing, and weak bionics, so as to achieve comfortable wearing and walking , high control precision and low output damping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
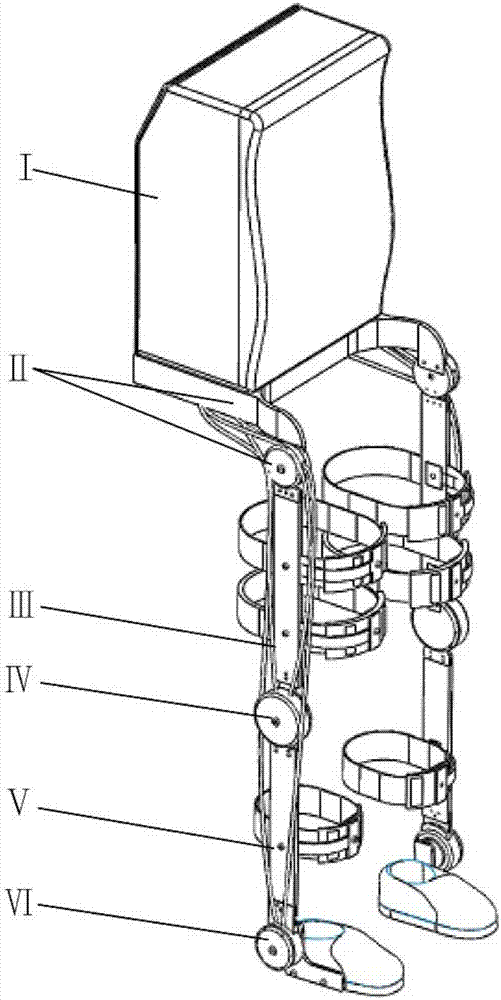
[0030] Such as figure 1 As shown, the robot of the present invention includes: backpack I, waist mechanism II, thigh fixing device III, knee joint mechanism IV, calf fixing device V, and ankle joint mechanism VI.
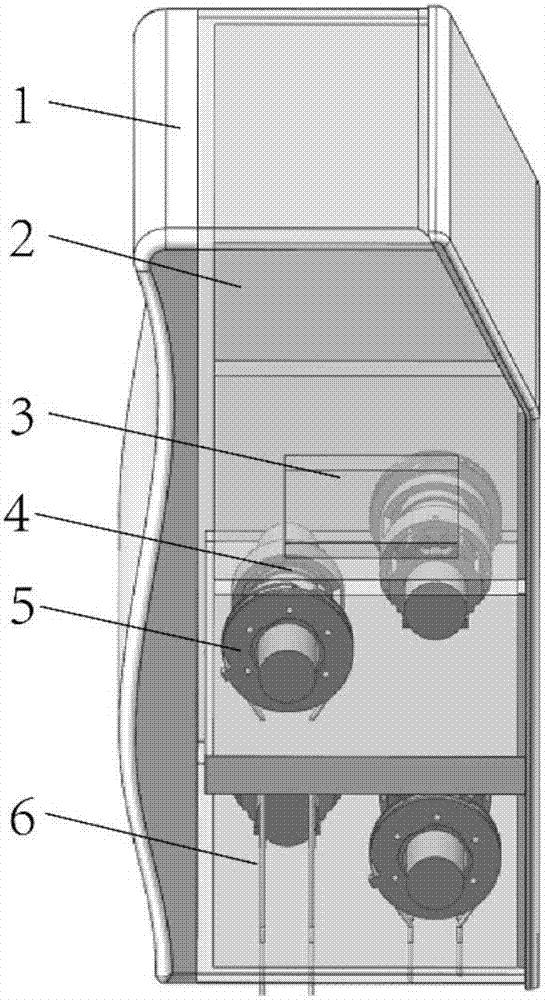
[0031] Such as figure 2 As shown, the backpack I of the present invention includes: a sponge pad 1 , a backpack shell 2 , a control panel 3 , a driver 4 , a driver winding reel 5 , and a wire rope 6 .
[0032] Wherein the sponge pad 1 is used for padding between the back of the human body and the backpack I, so that the backpack I is more comfortable to wear. The entire backpack is divided into three...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More