

Auxiliary light-weight integrated multi-freedom-degree lower limb exoskeleton
An exoskeleton and degree-of-freedom technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem of unsatisfactory power-assisted effects of multi-joint exoskeleton-assisted robots, complex design of active and passive drive systems, and restrictions on the range of motion of multi-joints, etc. problems, to achieve the effect of enhancing human-machine collaboration, increasing the pull-back function, and increasing the freedom of movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
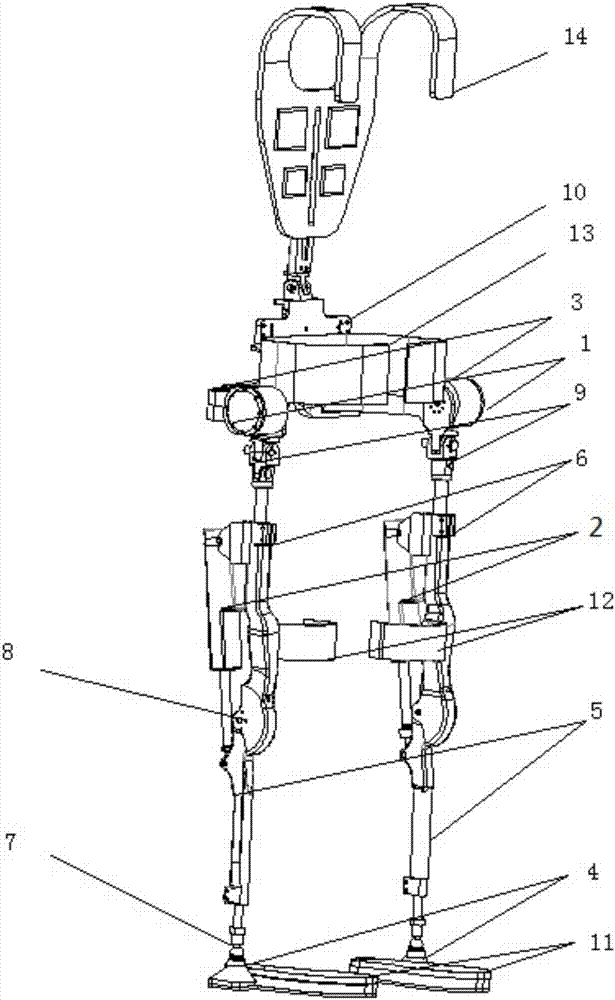
[0027] The technical problem to be solved by the present invention: in order to achieve good man-machine coupling of the power-assisted mechanical exoskeleton, its appearance and joint ratio are required to conform to the characteristics of the human body. The sense of load on the human body can play an auxiliary and boosting effect. The traditional hip joint mechanical structure does not have the freedom of movement performance that fully conforms to the human body. Even if the scattered degrees of freedom are close to the range of human activities, it cannot guarantee the comfort and safety of human-machine wear. Therefore, a new integrated multi-degree-of-freedom lightweight Assisted lower extremity exoskeleton robot. The appearance and joint ratio of the mechanical exoskeleton conform to the characteristics of the human body. The lower extr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More