

Pneumatic soft pole-climbing robot
A robot and robot body technology, applied in the field of pole-climbing robots, can solve problems such as low flexibility, slow operation, and robot damage, and achieve the effects of broad application prospects, reduced contact force, and good adaptability to the environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific preferred embodiments.
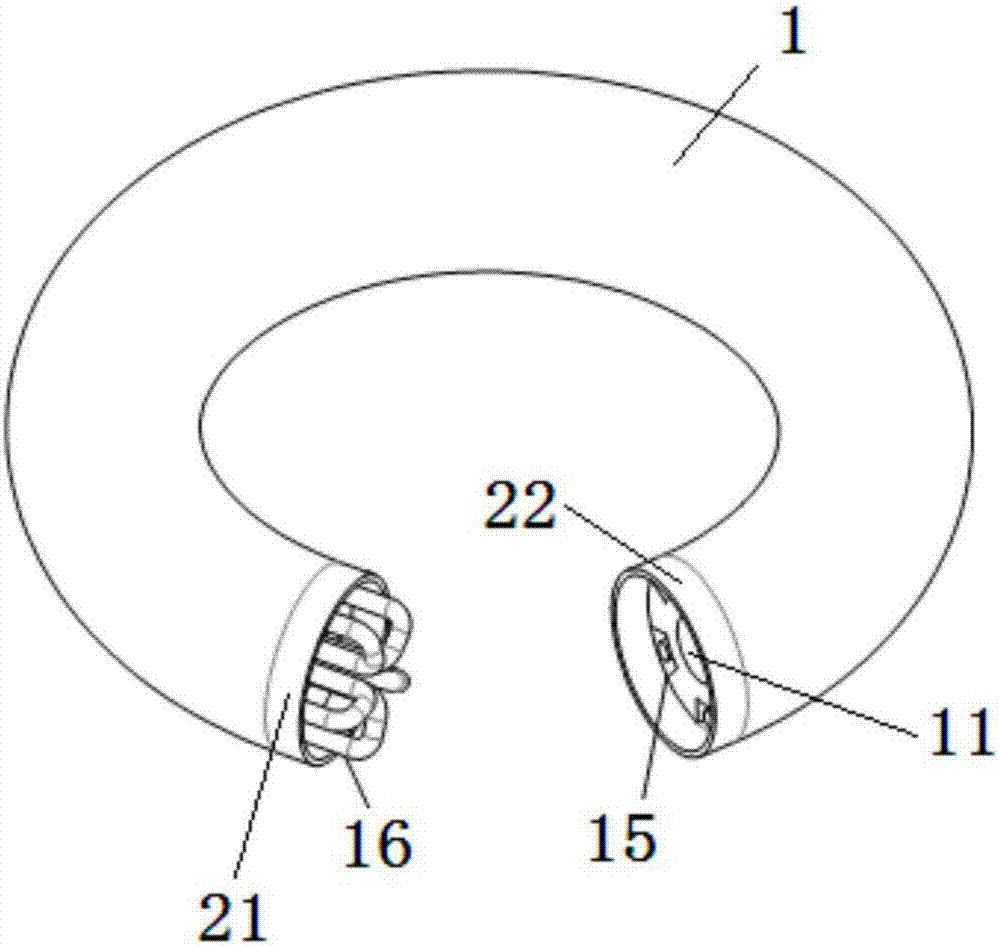
[0059] like figure 1 As shown, a pneumatic soft pole climbing robot includes a soft robot body 1 , an electromagnetic clamping device, a drive control system and a remote control device 4 .
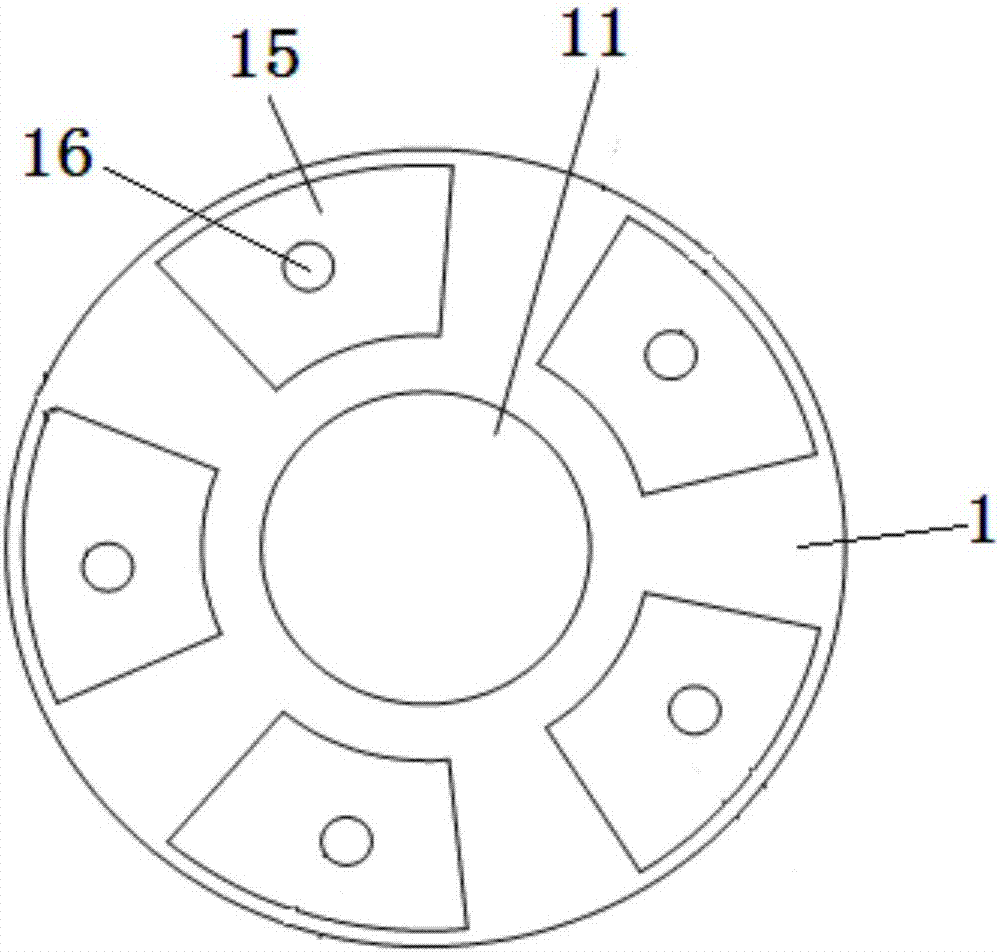
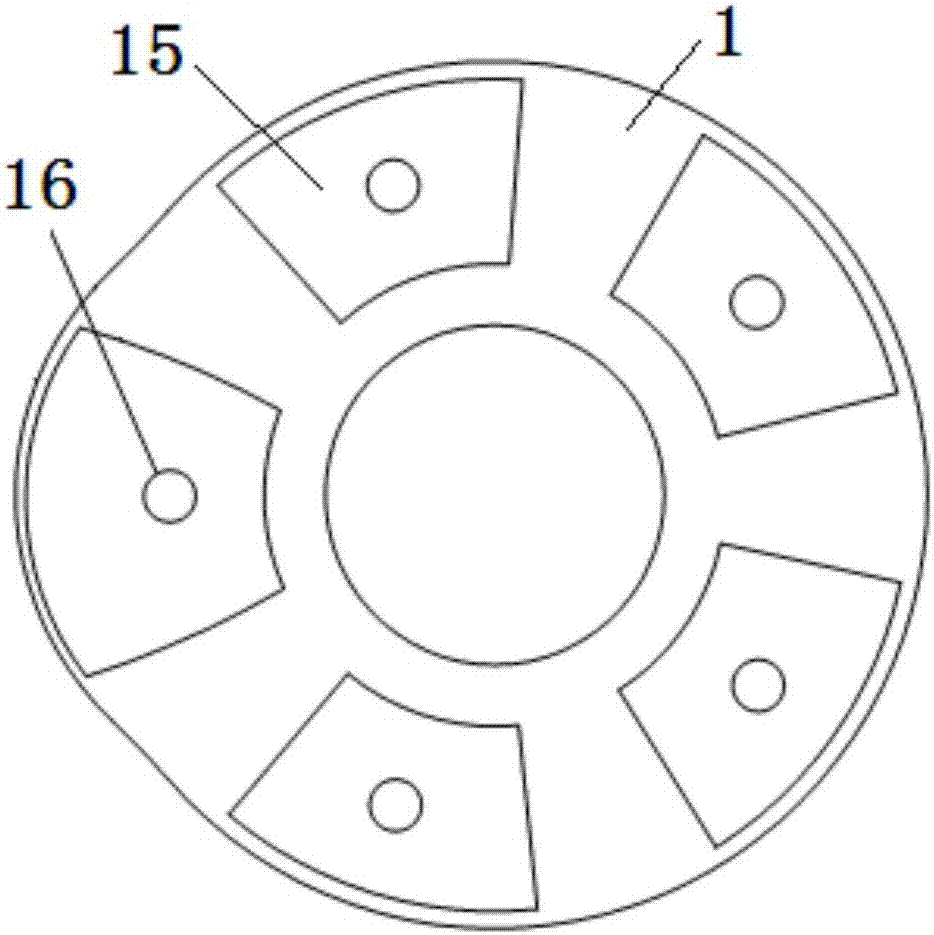
[0060] The soft robot body 1 is ring-shaped with openings, has two open end faces, and the cross section of the soft robot body is as follows: figure 2 circle shown.
[0061] When the ring-shaped soft robot body is straightened, the soft robot body takes on a cylindrical structure.
[0062] The soft silica gel or rubber of the soft robot body 1 is preferably EPDM.
[0063] A central accommodating cavity 11 is provided at the central loop line of the soft robot body, and the cross section of the central accommodating cavity is preferably circular.
[0064] Several airtight air cavities 15 are uniformly arranged on the body of the so...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More