

Distributed real-time three-dimensional geographic surveying and mapping system on basis of unmanned aerial vehicle clusters
A distributed real-time, unmanned aerial vehicle technology, applied in surveying and navigation, measuring device, photogrammetry/video surveying and other directions, can solve the problem of poor acquisition accuracy, high weather conditions, and limit the efficiency of UAV surveying and mapping. and other problems to achieve the effect of shortening the time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
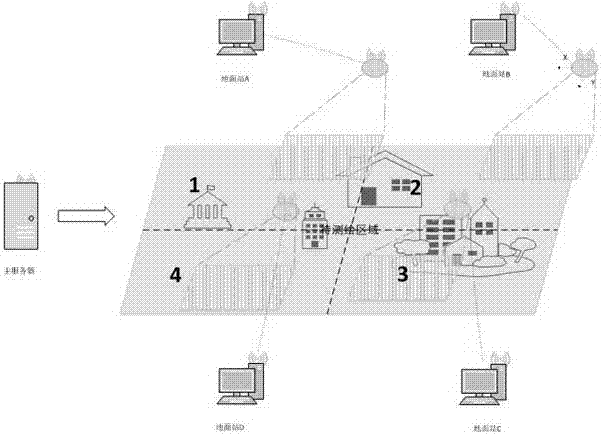
[0055] Such as figure 2 Shown: This set of examples includes a main server, a cluster of 4 drones, and 4 corresponding to the ground station host.
[0056] 1) Delineate the boundary of the area to be surveyed and mapped on the plane ground of the main server;
[0057] 2) The main server divides the area to be tested into four areas according to the UAV cluster configuration, and calculates the corresponding boundary information;
[0058] 3) The main server sends the boundary information of the 1 / 2 / 3 / 4 area to the corresponding ground station host A / B / C / D;
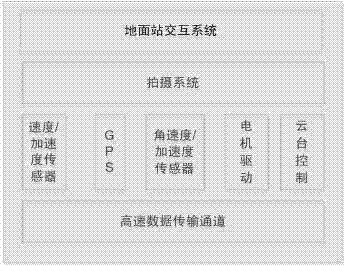
[0059] 4) The ground station host uploads the task to the corresponding UAV through the "ground station interactive system";
[0060] 5) The UAV plans the automatic surveying and mapping path according to the area information of the assigned task;
[0061] 6) The UAV flies over the surveying area and hovers at the planned collection point;
[0062] 7) Adjust the camera pointing through the PTZ, take pictures, and obtai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More