

Auxiliary power upper limb exoskeleton
An auxiliary power and exoskeleton technology, applied in passive exercise equipment, manipulators, program-controlled manipulators, etc., can solve the problems of feeling heavy, inconvenient to carry and popularize, and unable to be carried by users, and achieve the effect of increasing the carrying capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings. It should be noted here that the descriptions of these embodiments are used to help understand the present invention, but are not intended to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below may be combined with each other as long as they do not constitute a conflict with each other.
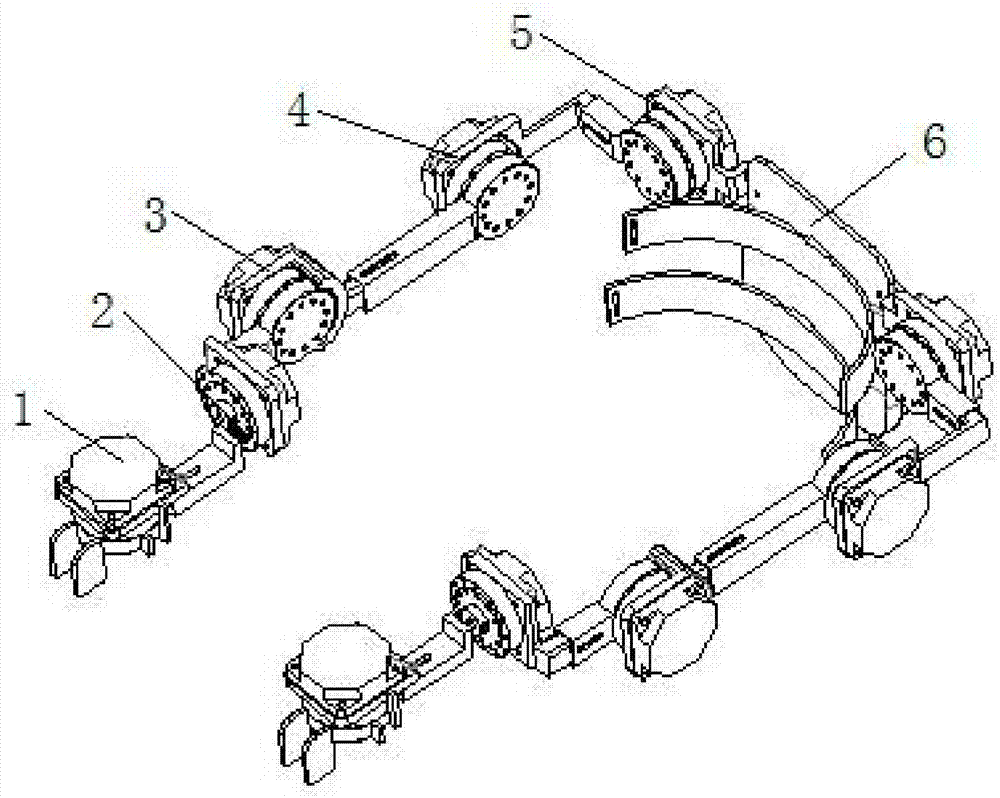
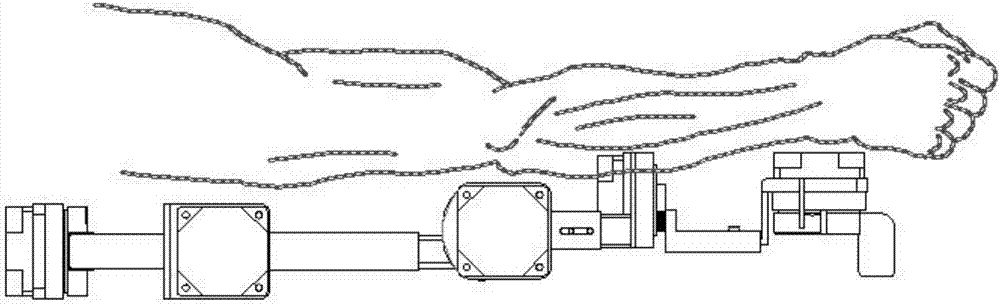
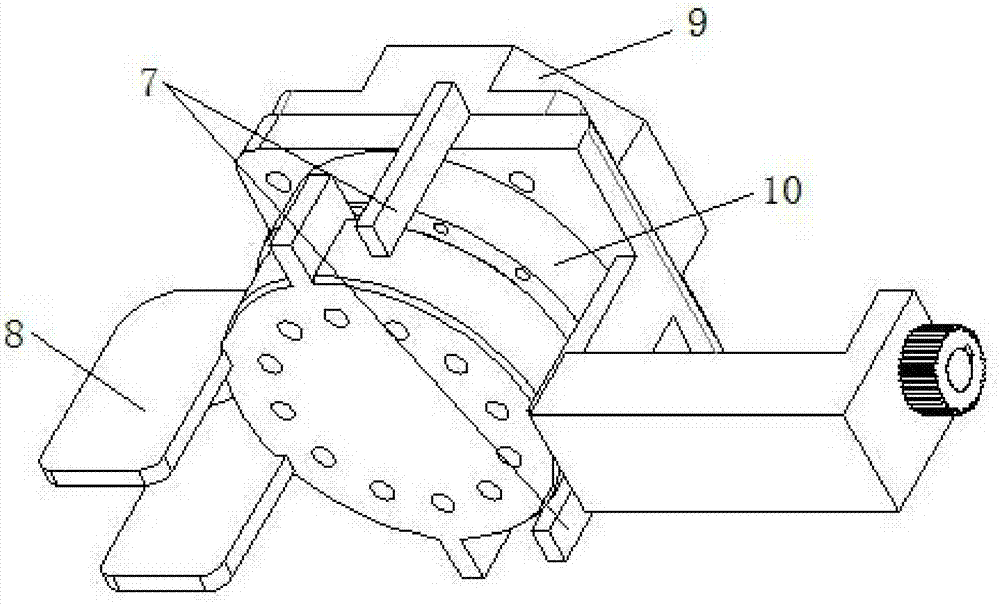
[0036] refer to Figure 1 to Figure 10 . An auxiliary power upper extremity exoskeleton, comprising: a back connection module 6: realizing the carrying function through straps 25; side, which is flexibly connected with the back connection module 6; the front and rear movement modules 4 of the two arms: the front and rear movement module 4 of the big arm is flexibly connected with the stretch module 5 of the big arm; the two elbow rotation modules 3: the elbow The rota...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More