

Path tracking method for pilotless automobile
A technology of unmanned vehicles and unmanned vehicles, which is applied in the direction of two-dimensional position/channel control, etc., can solve problems such as large amount of calculation, inaccurate positioning, and complicated principles, and achieve small amount of calculation, improve accuracy, The effect of simple principle and calculation process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
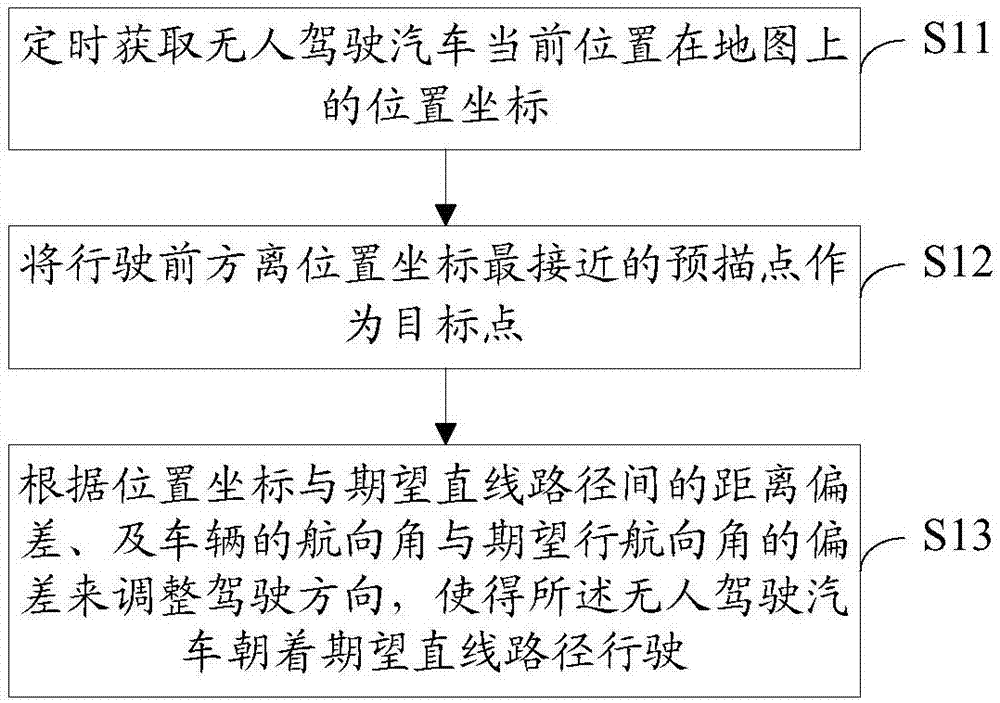
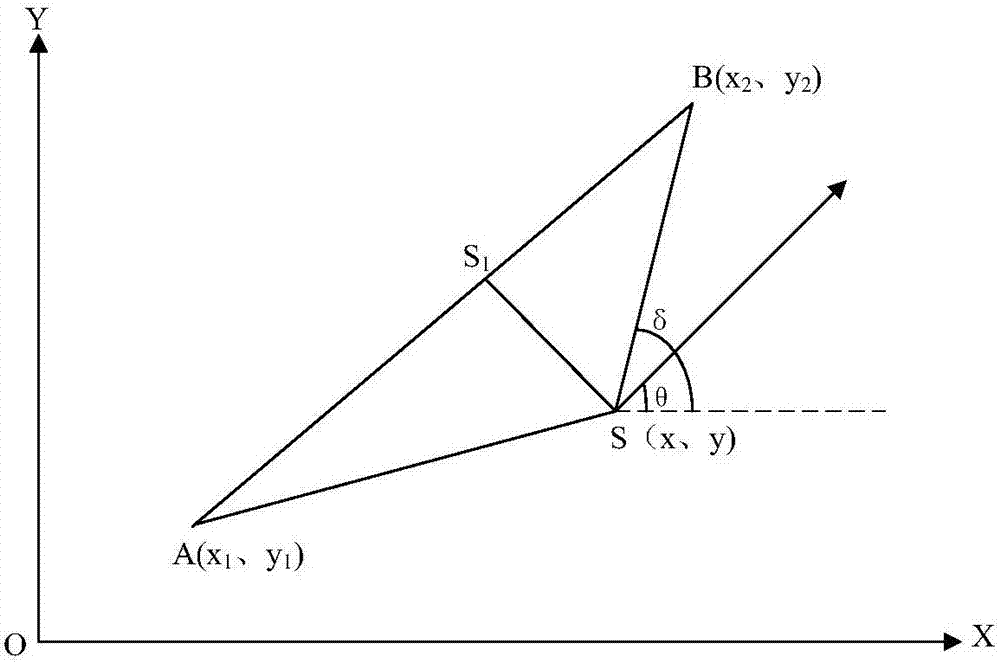
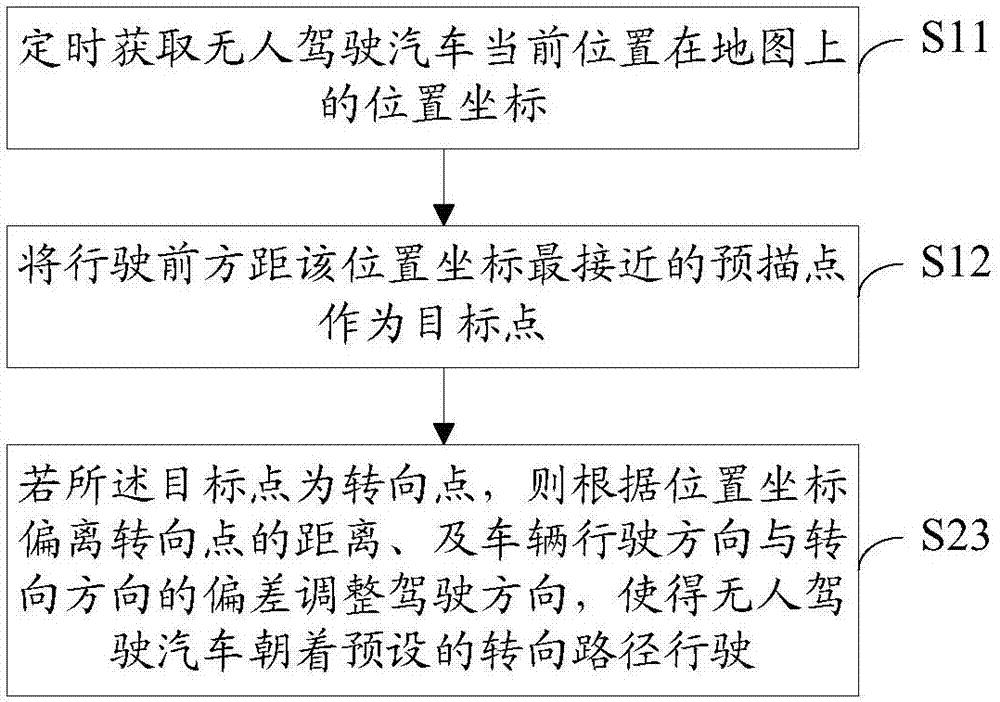
[0020] In an embodiment of the present invention, a path tracking method for an unmanned vehicle is provided. The method uses centimeter-level high-precision satellites to perform differential positioning on the unmanned vehicle. The path tracking method includes a straight line path tracking method or a steering path tracking method;
[0021] The straight-line path tracking method refers to driving based on the distance deviation between the current position of the unmanned vehicle and the expected straight-line path, and the deviation between the heading angle of the vehicle and the expected headi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More