

Trajectory prediction method for multiple mobile robots
A mobile robot and trajectory prediction technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., can solve the problem of insufficient estimated information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The novel technical solution of the present invention will be further described below in conjunction with accompanying drawings and actual formation cases.
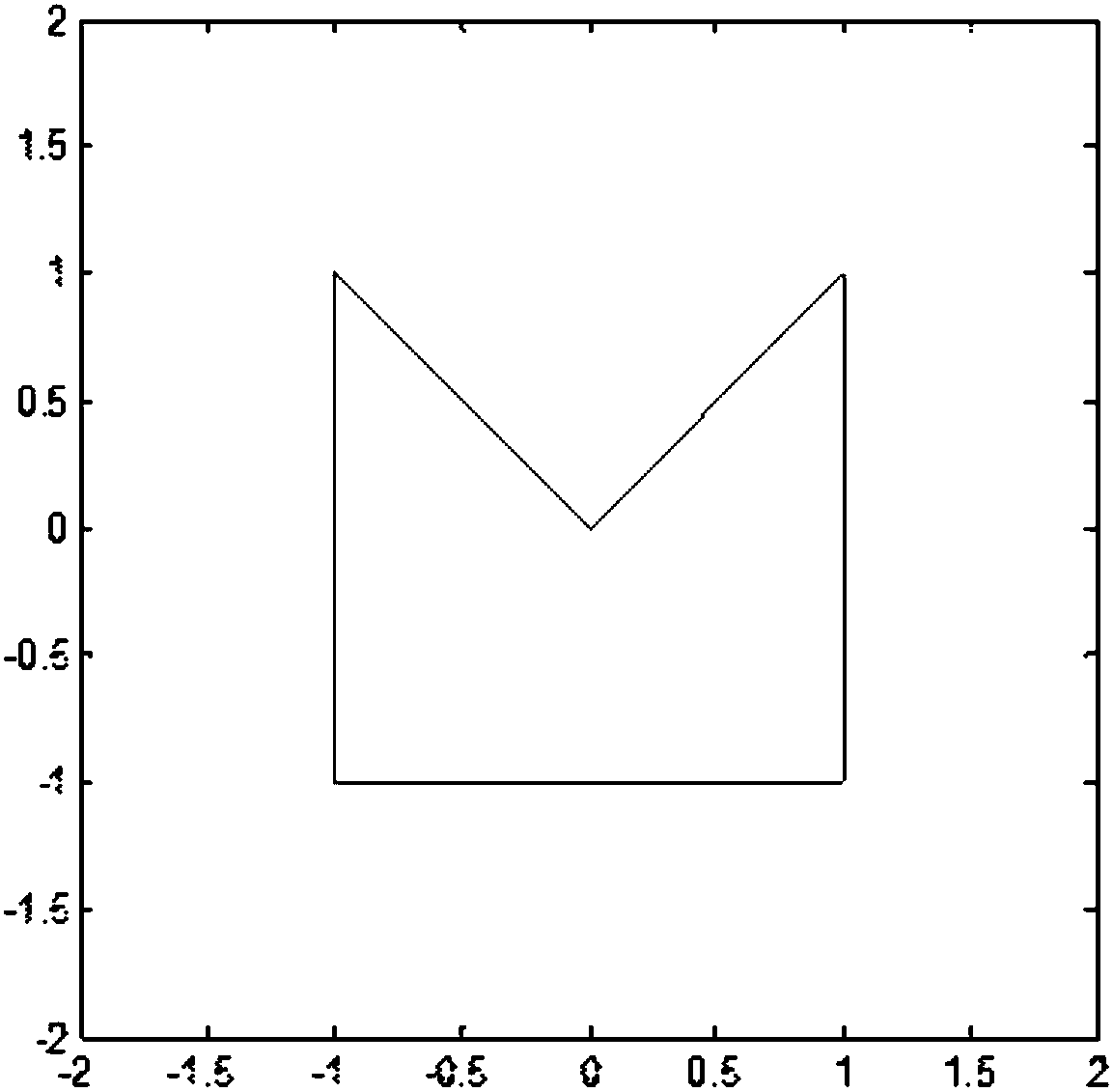
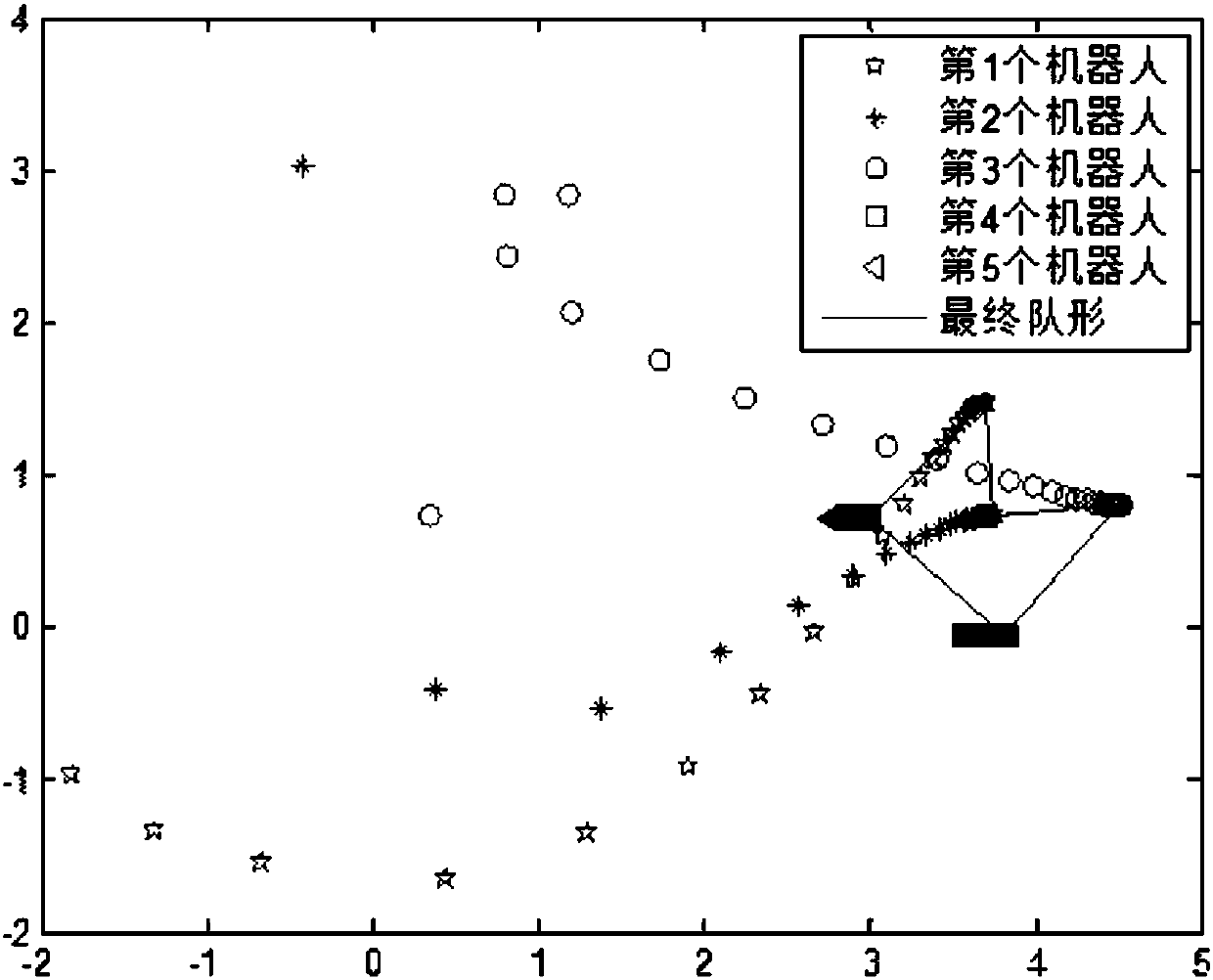
[0073] Suppose there is a multi-mobile human system composed of 5 robots, and the 5 robots are distributed on a two-dimensional plane, and their coordinates are (-1.3077,-1.3499), (-0.4336, 3.0349), (0.3426, 0.7254), (3.5784 ,-0.0631), (2.7694,0.7147), which needs to be composed as figure 1 The specific shape formation shown, the shape can be represented by coordinates in the two-dimensional plane space as (-1,1), (0,0), (1,1), (1,-1), (-1,- 1), where the two pilot nodes are moving to the right at a speed of 0.04 meters per second, such as image 3 shown. Deduce the algorithm process for this case:
[0074] Step 1, establish the motion model of multiple mobile robots in the complex plane
[0075] First establish a global coordinate system, and represent the two-dimensional plane space where the multi-robot move...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More