

Radar target fusion detection method based on non-Gaussian parameters
A radar target, Gaussian parameter technology, applied in measurement devices, radio wave measurement systems, radio wave reflection/re-radiation, etc. The characteristics of constant false alarm rate deterioration and other problems have achieved the effect of simple and effective parameter setting, wide application range and strong generalization ability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with the accompanying drawings. The embodiments of the present invention are used to explain the present invention, rather than to limit the present invention. Within the spirit of the present invention and the scope of protection of the claims, any modifications and changes made to the present invention fall within the protection scope of the present invention.
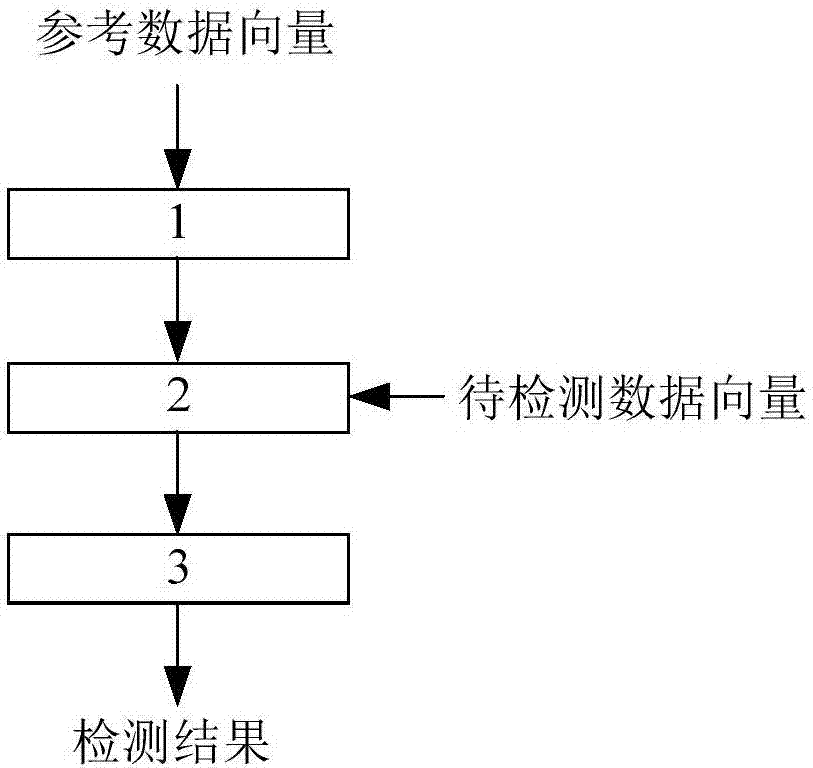
[0022] Refer to the attached figure 1 , the specific embodiment of the present invention is divided into the following steps:
[0023] Step 1 Aiming at the point target detection scene, take a single distance unit to be detected as the center, and continuously take a certain number of distance unit radar echo observation data before and after it, to form R reference data vectors x m ,m=1,2,…,R, where, x m , m=1,2,..., R is a vector of N×1 dimension, N represents the product of the number of radar receiving array elements and the number of c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More