

Multi-joint leg structure of biped walking robot
A walking robot, multi-joint technology, applied in the field of robotics, can solve the problems of the robot's multi-joint degrees of freedom movement is difficult, multi-degree-of-freedom difficult, complex structure and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
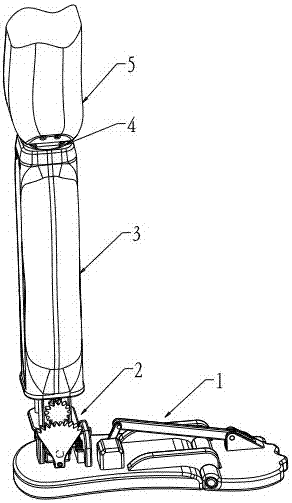
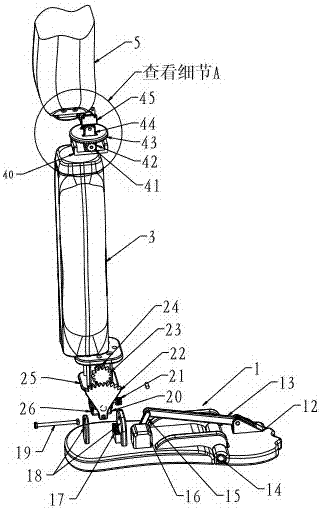
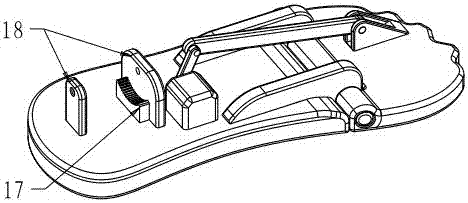
[0025] exist figure 1 , figure 2 , image 3 In the shown embodiment, the toe plate 12 is hinged with the foot plate through the toe joint shaft 14, the lower leg joint bracket 26 is hinged with the inner bracket 25 through the connecting shaft, the inner bracket 25 is hinged with the ankle joint support plate 18, and the drive motor 16 is installed on Connect and fix on the foot plate, drive motor 16 is connected with active connecting rod 15, and active connecting rod 15 is connected with transmission connecting rod 13, and transmission connecting rod 13 is connected with toe plate 12, and described driving motor 16 rotates and just drives driving connecting rod. The rod rotates 15, the rotation of the active link 15 drives the transmission link 13 to rotate, and the rotation of the transmission link 13 drives the toe board 12 to move around the toe joint axis 14, so as to realize the lifting movement of the toe board 12, and the innovative toe raising function assists 5 t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More