

Vehicle-mounted camera automatic calibration method based on lane line vanishing points
An automatic calibration and lane line technology, applied in the field of automotive image processing, can solve the problems of harsh calibration conditions, inconvenient operation, and large amount of calculation, and achieve the effect of fast calibration time, simple and convenient operation, and small amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
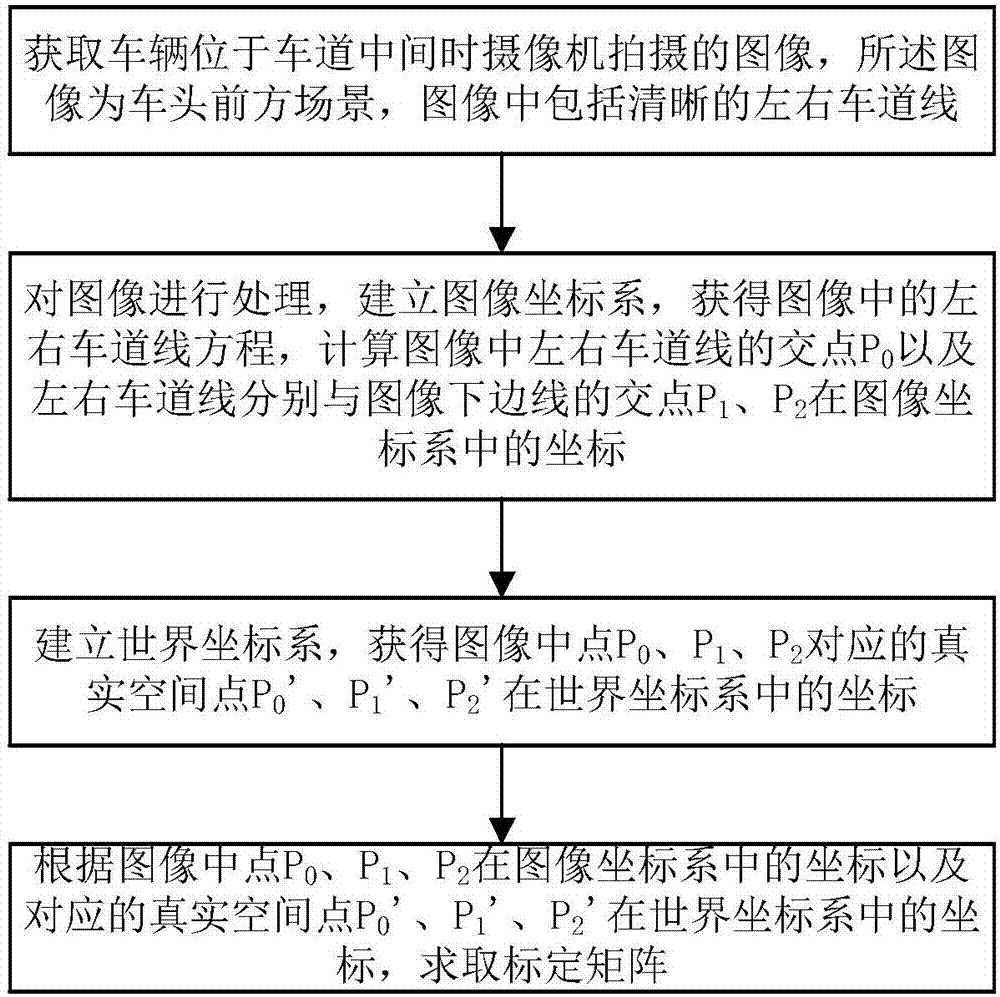
[0018] Such as figure 1 As shown, a kind of vehicle-mounted camera automatic calibration method based on lane line vanishing point provided by the present invention, specifically comprises the following steps:
[0019] Step 1. Obtain the image captured by the camera when the vehicle is in the middle of the lane. The image is the scene in front of the vehicle, and the image includes clear left and right lane lines.
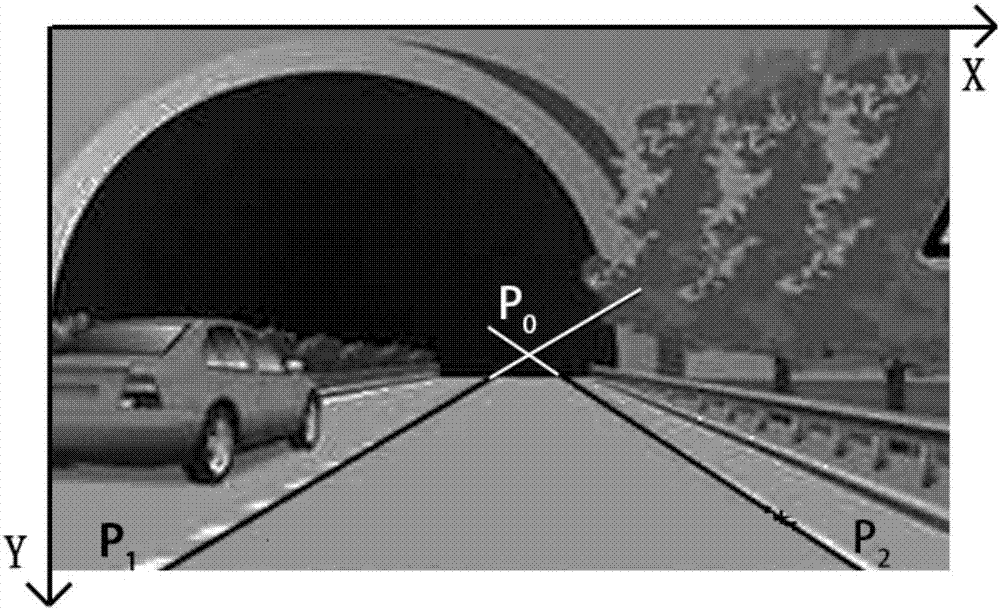
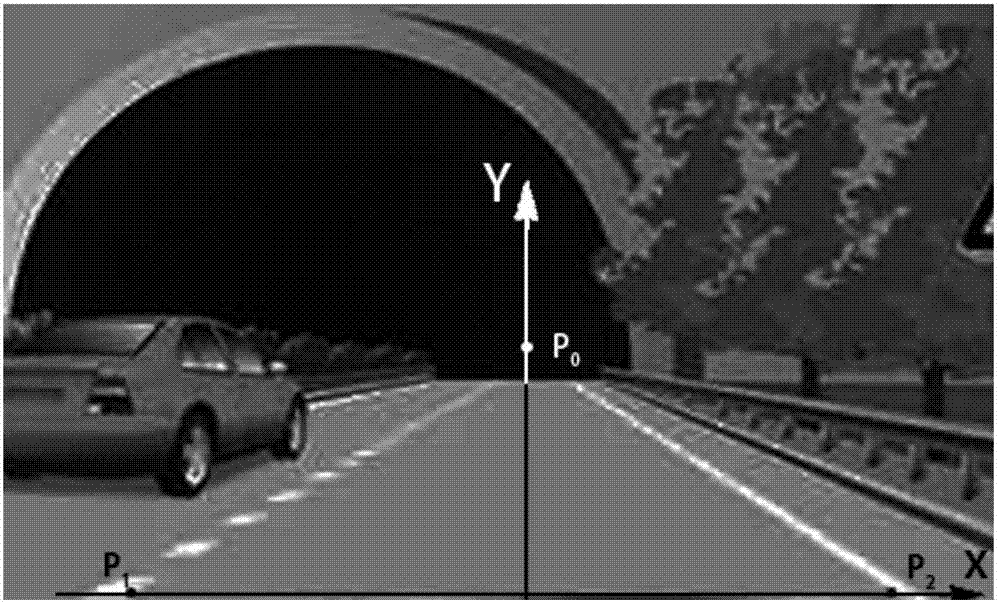
[0020] Step 2. Process the image, establish the image coordinate system, obtain the left and right lane line equations in the image, and calculate the intersection point P of the left and right lane lines in the image 0 And the intersection point P of the left and right lane lines and the lower edge of the image respectively 1 ,P 2 The coordinates in the image coordinate system, specifically include:
[0021] 2.1. Define the first point in the upper left corner of the image as the origin of the coordinates. The horizontal direction of the image is the X axis, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More