

An Image Matching Method for Matching Matrix in Monocular Vision Positioning of Unmanned Vehicles
A matching matrix, monocular vision technology, applied in image analysis, image enhancement, image data processing and other directions, can solve the problems of lack of information screening, omission of important information, large amount of data calculation, etc., to achieve convenient algorithm design and good visualization effect , the effect of reducing hardware requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
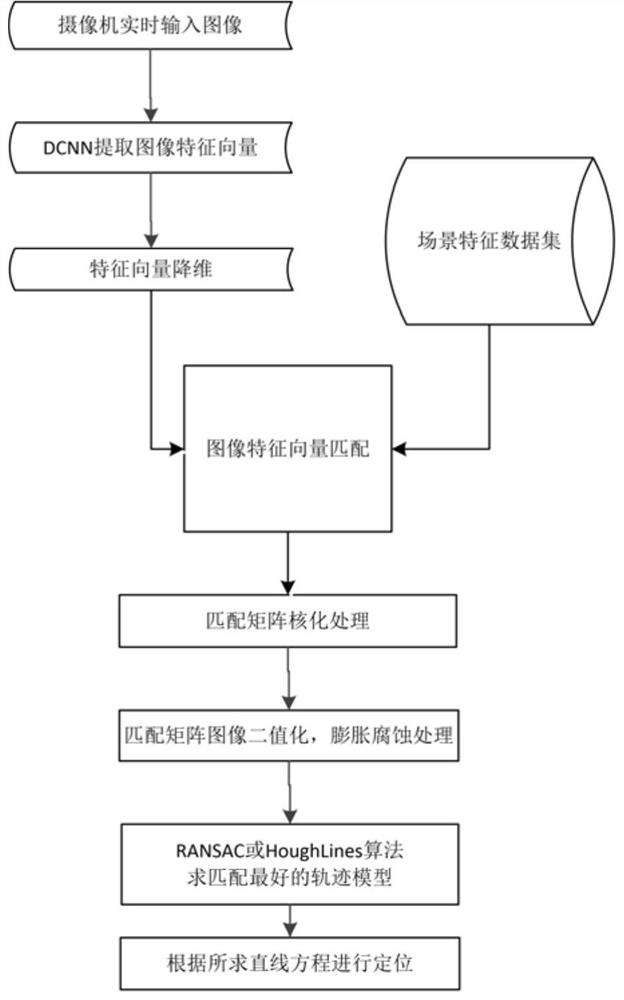
[0032] Such as figure 1 Shown, method flow process of the present invention is:
[0033] 1. For the input image, the global feature description is performed through the deep convolutional neural network DCNN, and the third convolutional layer is extracted as the image feature.
[0034] For the input image, the global feature description is performed by a deep convolutional neural network DCNN. This method uses the AlexNet network in the Tensorflow framework. The network won the championship in the 2012 ImageNet image classification competition. The network structure includes 5 convolutional layers and 3 fully connected layers. Each convolutional layer contains activation functions and local response normalization, and then After pooling. It has been proved by practice that the 64896-dimensional features extracted by the third-layer convolutional network (cov3) are the most robust, and the scene can still be recognized when the environment changes greatly.
[0035] 2. Use P...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More