Method for controlling balance of quasi-humanoid robot
A control method and robot technology, which is applied in the fields of motor vehicles, complex mathematical operations, transportation and packaging, etc., can solve problems such as high computational complexity, inapplicability, and difficulty for robots to perform specified actions, and achieves low computational complexity. , the effect of real-time balance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
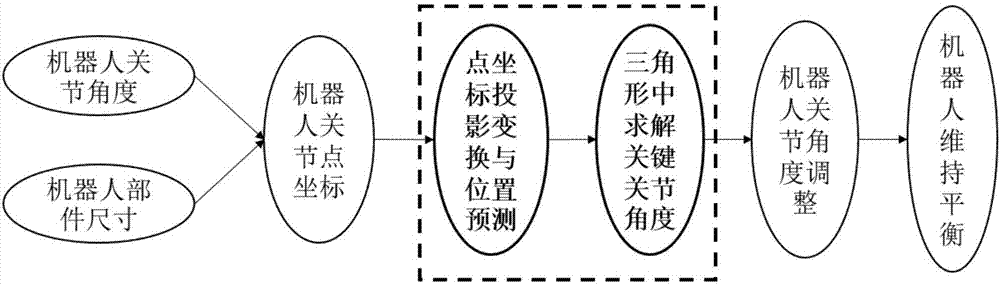
[0027] figure 1 It is a schematic diagram of an example of a balance control method for a humanoid robot based on joint angles. The present invention mainly includes the contents of "point coordinate projection transformation and position prediction" and "solution of key joint angles in triangles". In this method, the joint angles of the robot are first acquired through sensors, combined with the known dimensions of the robot components, and based on the principle of forward kinematics, the coordinates of the required joint points and the coordinates of the center of gravity are calculated. Then, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More