

Intelligent united cooperative method based on baby carriage and unmanned plane and system
A trolley and unmanned aerial vehicle technology, applied in the field of intelligent joint collaboration method and its system, can solve the problems of children's carriages dumping or sliding, threatening children's lives, trolleys getting lost, etc., and achieve the effect of avoiding collisions and avoiding collisions with cars and pedestrians
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0089] refer to figure 2 as shown, figure 2 A flow chart of an intelligent joint collaboration method provided for one example of the present invention.
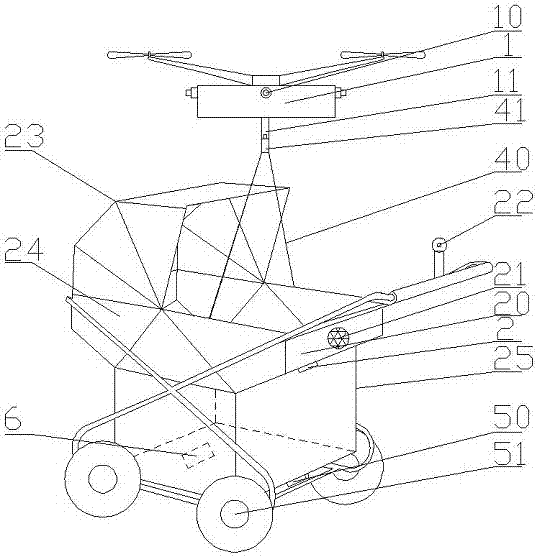
[0090] Specifically, this embodiment provides an intelligent joint cooperation method based on the children's trolley 2 and the UAV 1, including the UAV 1, the children's trolley 2, the processing device 3, the connection device 4, the driving device 5 and the storage battery 6, which It is characterized in that the method comprises the following steps:
[0091] S1 After detecting that the child is fixed in the seat pocket 24 by using the safety belt, use the positioning device 302 to locate the current position information in real time and detect whether the distance between the positioning information and the external device exceeds the preset distance;
[0092] S2. If the preset distance is exceeded, send a video request to the external device and detect in real time whether the facial image in the video image matches...
Embodiment 2
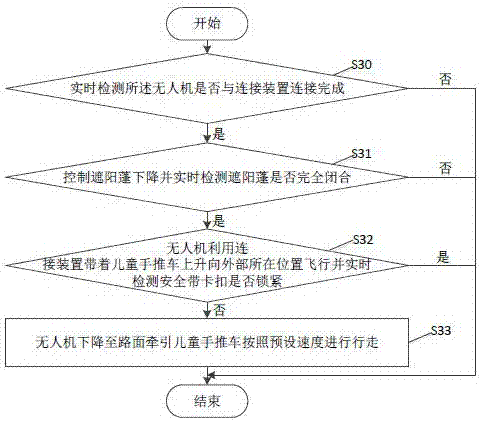
[0113] refer to image 3 as shown, image 3 A flow chart of a method for detecting whether the seat belt buckle 41 is locked is provided for one example of the present invention.
[0114] Specifically, this embodiment is basically the same as Embodiment 1, the difference is that in this embodiment, when it is detected that the current place is an open-air place, the method further includes the following steps:
[0115] S30, detecting in real time whether the connection between the UAV 1 and the connecting device 4 is completed;
[0116] S31, if so, control the awning 23 to descend and detect in real time whether the awning 23 is completely closed;
[0117] S32. If so, the UAV 1 uses the connection device 4 to take the children's trolley 2 up to fly to the outside position and detect in real time whether the seat belt buckle 41 is locked;
[0118] S33. If it is not locked, the drone 1 descends to the road and pulls the children's trolley 2 to walk at a preset speed.
[0119] ...
Embodiment 3
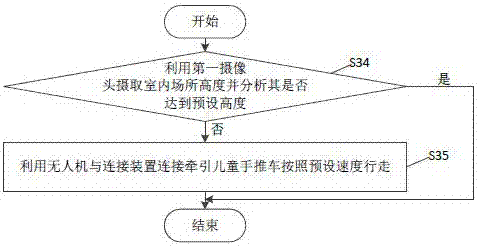
[0122] refer to Figure 4 as shown, Figure 4 A flow chart of a method for detecting the height of an indoor place provided by one example of the present invention.
[0123] This embodiment is basically the same as Embodiment 1, the difference is that in this embodiment, after detecting whether the current place is an open place, the method further includes the following steps:
[0124] S34. If it is detected that it is not an open-air place, use the first camera 22 to capture the height of the indoor place and analyze whether it reaches the preset height;
[0125] S35. If it is not reached, use the UAV 1 to connect with the connecting device 4 to pull the children's trolley 2 to walk at a preset speed.
[0126] Wherein, the preset height is 0-10 meters, preferably 3 meters in this embodiment.
[0127] Specifically, after detecting whether the current place is an open-air place, if it is detected that the place is not an open-air place, the first camera 22 is used to captur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More