

Mechanical arm connecting device for surgical robot and surgical robot
A surgical robot and connecting device technology, applied in the field of surgical robots, can solve problems such as poor coordination, lack of force feeling, and reduced flexibility, and achieve the effects of convenient positioning, large surgical space, large range of motion and space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with accompanying drawing.
[0032] It should be noted in this application that the term "front" used in this application refers to the part of the surgical robot close to the patient, while the term "rear" refers to the part of the surgical robot away from the patient; the term "upper end" used in this application is the end of the surgical robot away from the ground, and the term "lower end" is the end close to the ground.
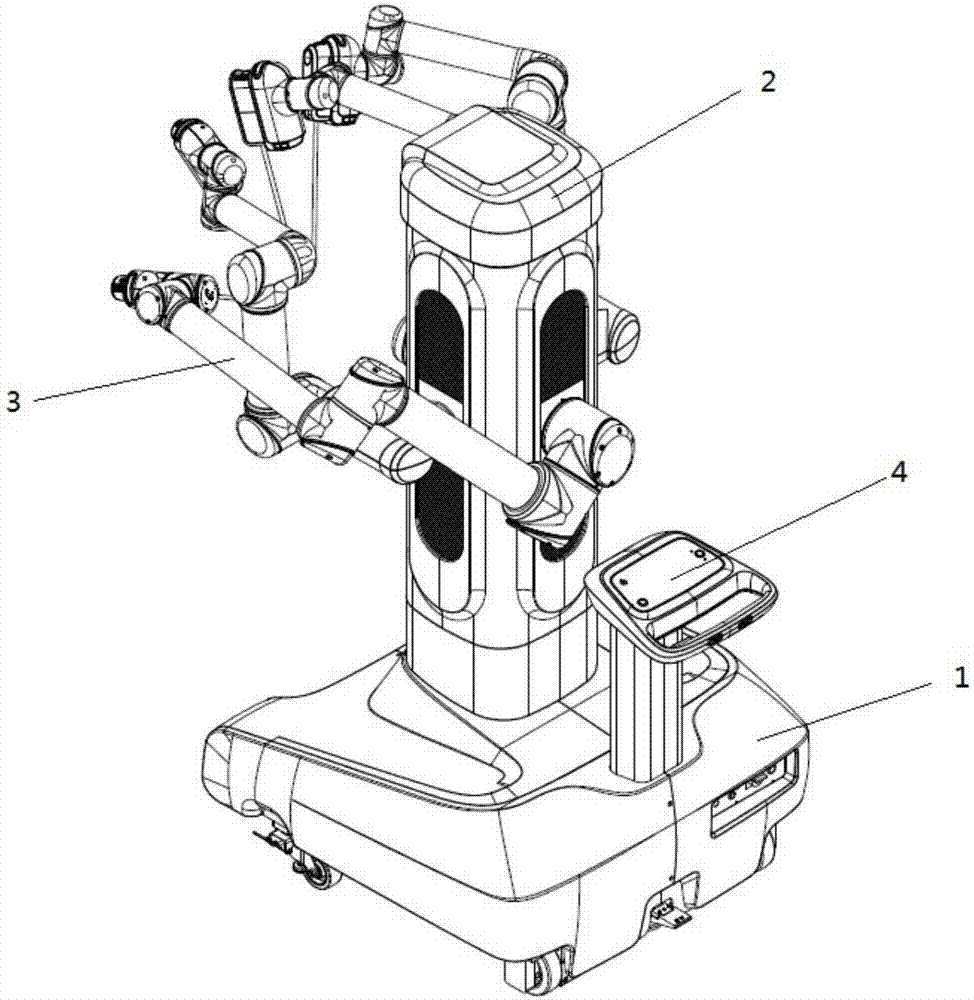
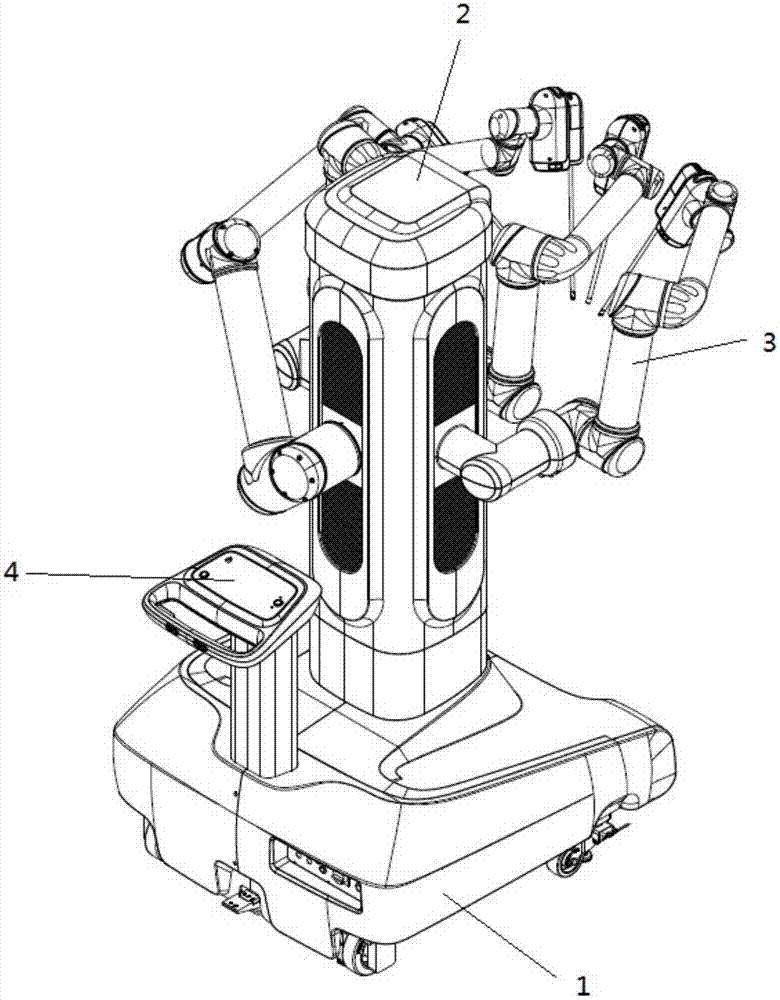
[0033] figure 1 with figure 2 It is an overall perspective view of the surgical robot of the present invention. Including base 1, column 2, mechanical arm 3 and push handle 4. The column 2 is located in the middle of the upper end of the base 1 , the push handle 4 is located at the rear of the upper end of the base 1 , and the mechanical arm 3 is arranged on the side wall of the column 1 .
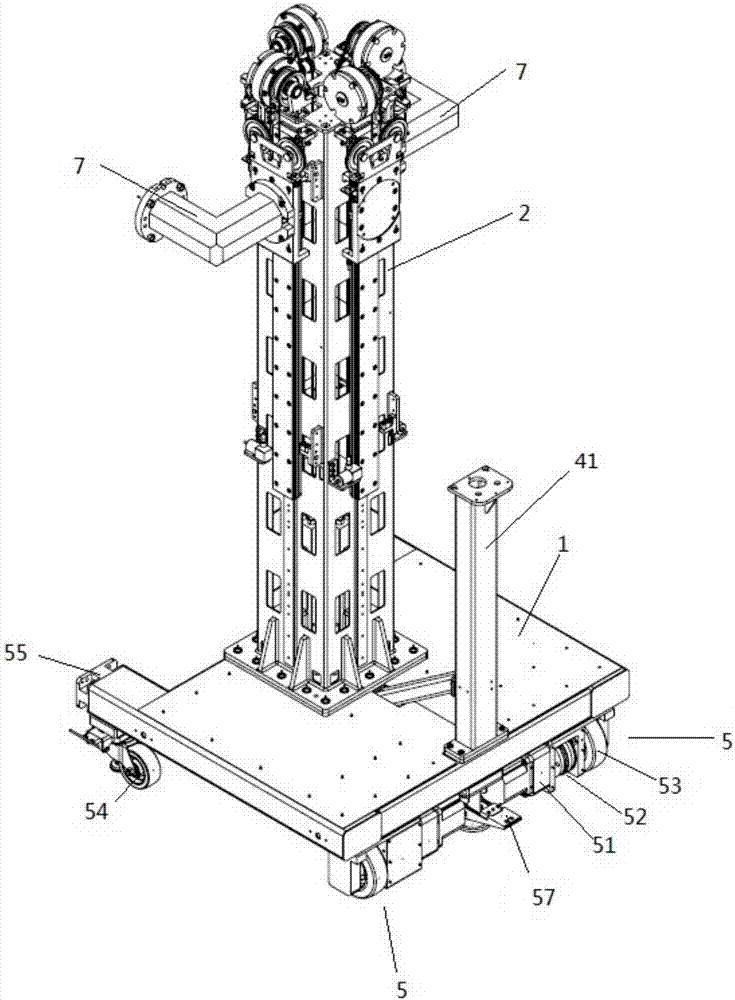
[0034] image 3 with Figure 4 It is a schematic diagram of the internal structure...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More