

Unmanned aerial vehicle automatic collision avoidance system
An unmanned aerial vehicle and automatic technology, applied in control/regulation systems, non-electric variable control, instruments, etc., can solve problems such as difficult to guarantee air flight safety, and achieve the effect of systematization and improvement of flight safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the objects and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
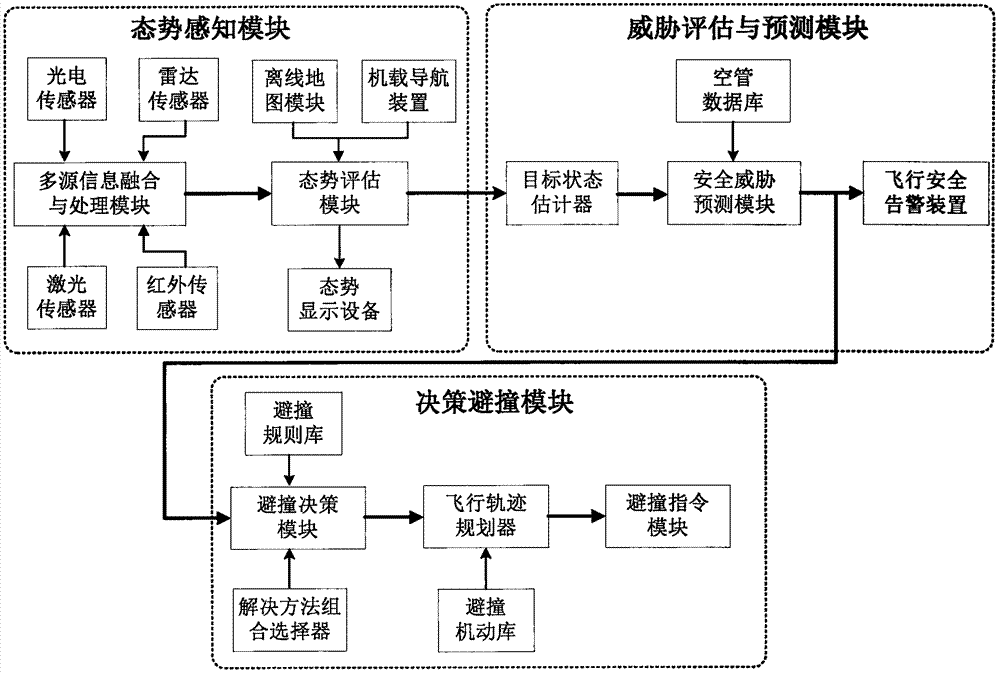
[0030] Such as Figure 1-2 As shown, the embodiment of the present invention provides an automatic collision avoidance system for drones, including:
[0031] UAV situational awareness module is used for signal-level or pixel-level target detection, tracking and identification, and abstracts the overall understanding of the environment from information to realize environmental cognition, including target behavior understanding, situation assessment, threat Estimation and situational understanding;
[0032] The UAV anti-collision threat assessment and prediction module is used to perform threat assessment and conflict prediction on static obstac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More