

Flexible mechanical arm with buffering function
A manipulator and flexible finger technology, applied in the field of flexible manipulators, can solve the problems of complicated pipeline connection, strength limitation, and easy failure of flexible manipulators, and achieve the effect of increasing the application range and reducing the accuracy requirements.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
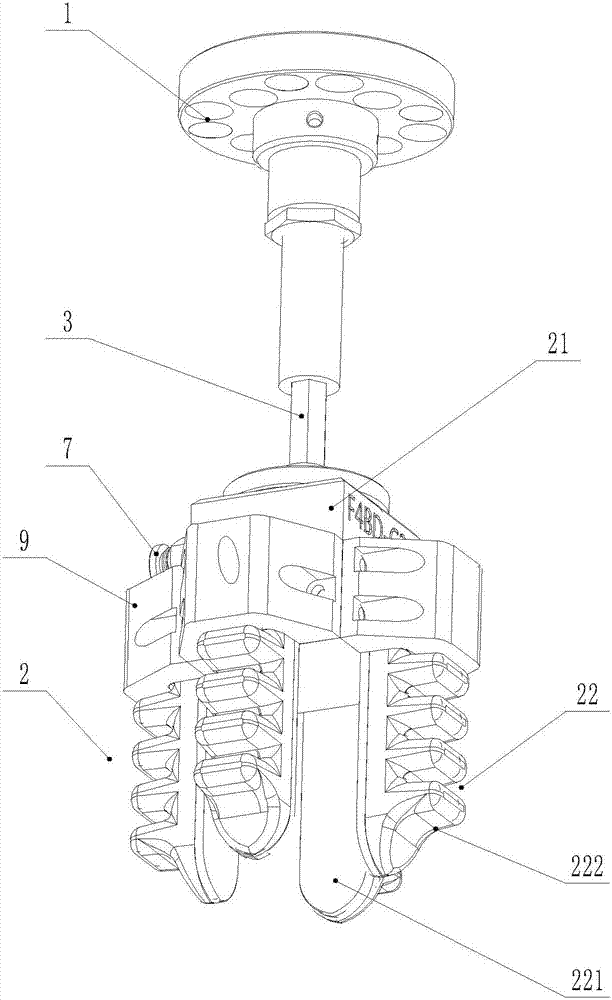
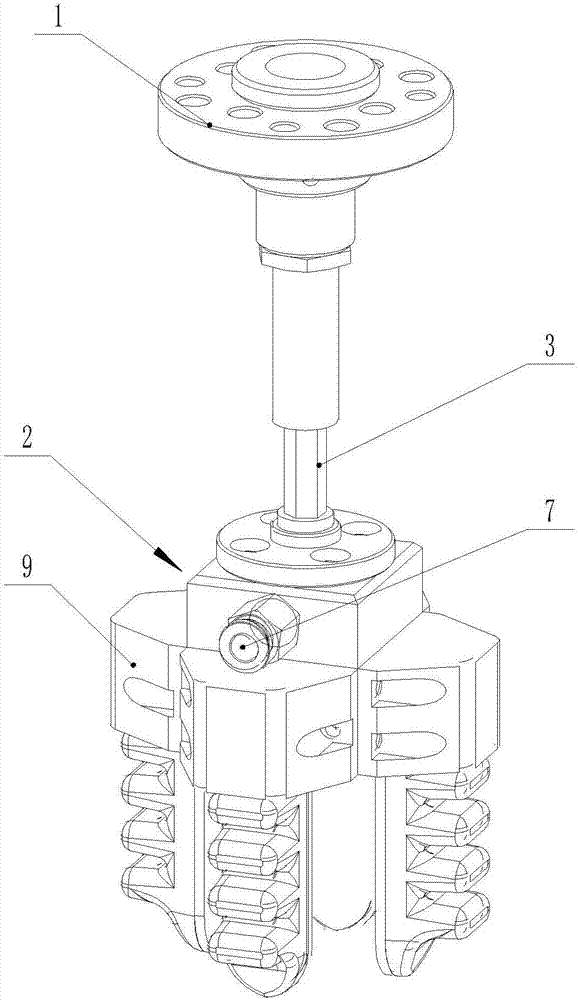
[0040] Such as Figures 1 to 10 As shown, a flexible manipulator with cushioning function includes a flexible manipulator body 2 and a mounting flange 1, and the flexible manipulator also includes an elastic buffer assembly installed between the flexible manipulator body 2 and the mounting flange 1 The space is used to elastically change the distance between the installation flange 1 and the flexible manipulator body 2. The flexible manipulator body 2 includes an integrated block 21, and at least two flexible fingers 22 that cooperate with each other to achieve flexible clamping are installed on the integrated block 21. , the flexible finger 22 includes a finger bottom plate 221 and a finger finger surface 222, the finger bottom plate 221 and the finger finger surface 222 together form a drive chamber, and the elastic modulus of the finger bottom plate 221 is greater than that of the finger finger surface 222 modulus, each flexible finger 22 is provided with an air vent 223 co...
Embodiment 2
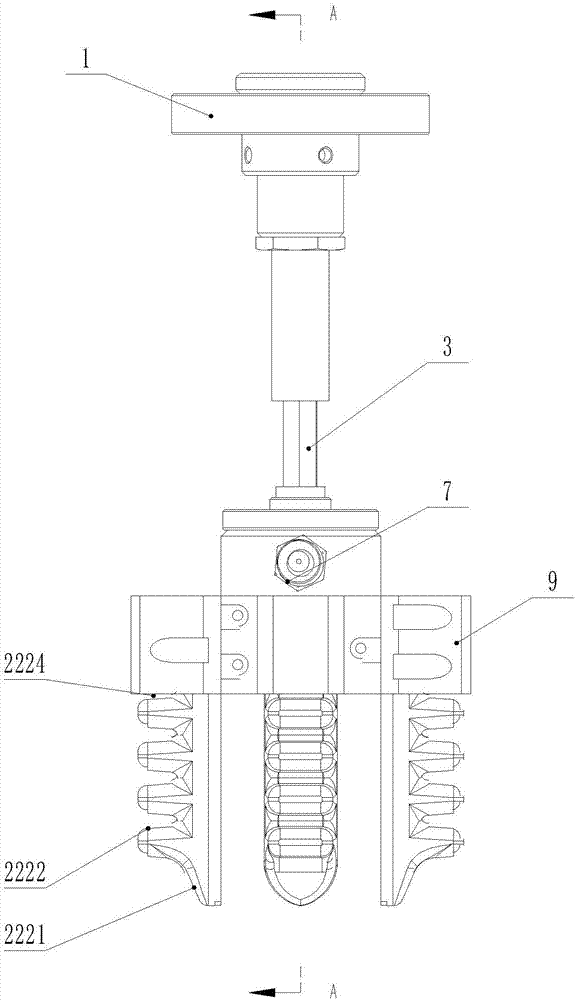
[0047] Such as Figure 8-10 As shown, the finger segment 2222 is wave-shaped, and at least one group of reinforcing ribs is arranged in the driving chamber, and the group of reinforcing ribs includes the rib body 12 equal to the number of troughs of the finger segment 2222. The reinforcing rib The body 12 is connected one by one between the inner sidewall of the trough of the finger segment 2222 and the finger bottom plate 221. The rib body 11 can improve the compressive strength of the flexible finger and prolong the service life. The rib body 12 does not affect the gas flow. flow.
[0048] Other technical features in Embodiment 2 are similar to those in Embodiment 1, and will not be repeated here.
Embodiment 3
[0050] Such as Figure 11 As shown, the knuckle segment 2222 is wave-shaped, and the bottom of the trough of the knuckle segment 2222 is provided with a reinforcing sheet 11, and at least one set of reinforcing ribs is also provided in the driving chamber, and the set of reinforcing ribs includes a knuckle. There are rib bodies 12 equal in number to the troughs of the segment 2222 , and the rib bodies 12 are connected between the inner sidewall of the trough bottom of the finger segment 2222 and the finger bottom plate 221 in one-to-one correspondence.
[0051] Other technical features in Embodiment 3 are similar to those in Embodiment 1, and will not be repeated here.
[0052] and Figure 12 Among them, the flexible finger only uses the reinforcing sheet 11 alone to improve the bending life of the flexible finger 22, and the reinforcing sheet 11 can use other fibers.
[0053] The above-mentioned embodiments all use gas as the driving medium, and of course liquid can also be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More