

High-precision grabbing mechanism of robot
A grasping mechanism and high-precision technology, which is applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of poor versatility, poor workpiece grasping ability, and poor grasping ability of workpieces with different surfaces, etc., to achieve the goal of grasping Good effect, strong grasping ability and strong versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
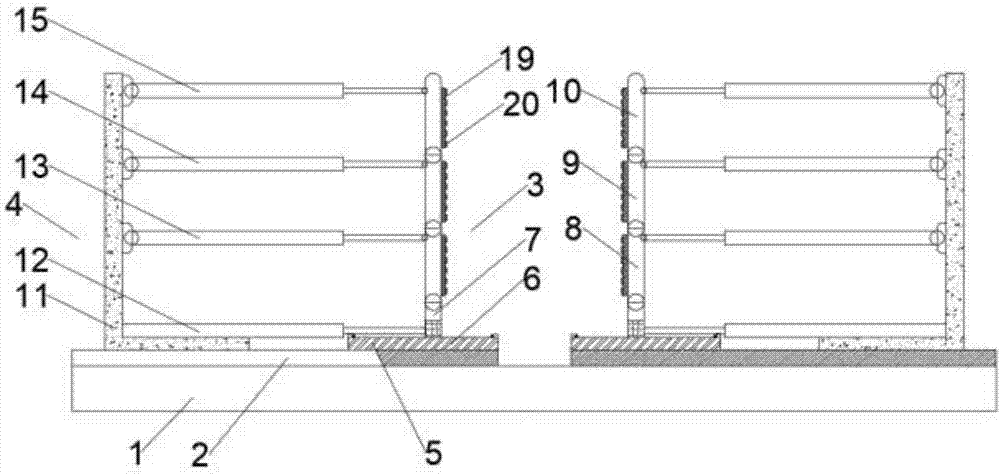
[0024] Such as figure 1 , Figure 4 and Figure 5 As shown, a high-precision grabbing mechanism of a robot provided by the present invention includes a grabbing base 1, the grabbing base 1 is a circular structure, and at least three points are arranged on the grabbing base 1. The base 2, the sub-base 2 is arranged at equal intervals around the center of the grabbing base 1, the sub-base 2 is arranged along the axial direction of the grabbing base 1, and the sub-base 2 is provided with The clamping device 3 and the driving device 4, the centers of the clamping device 3, the driving device 4 and the grasping base 1 are on a straight line, and the driving device 4 is located on the outside of the grasping base 1;
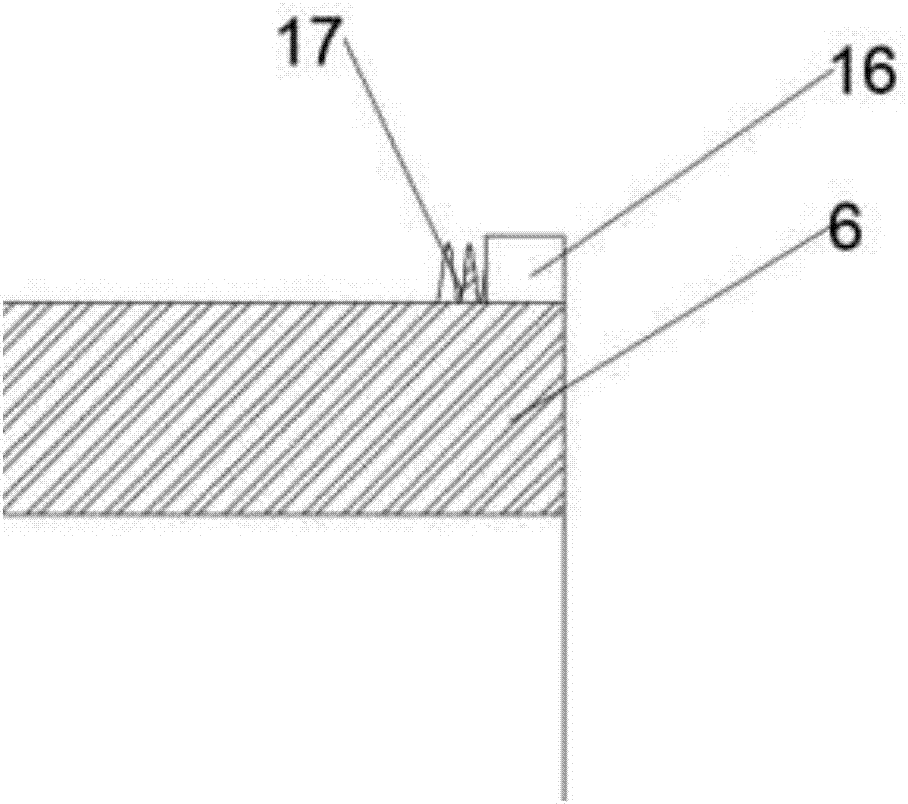
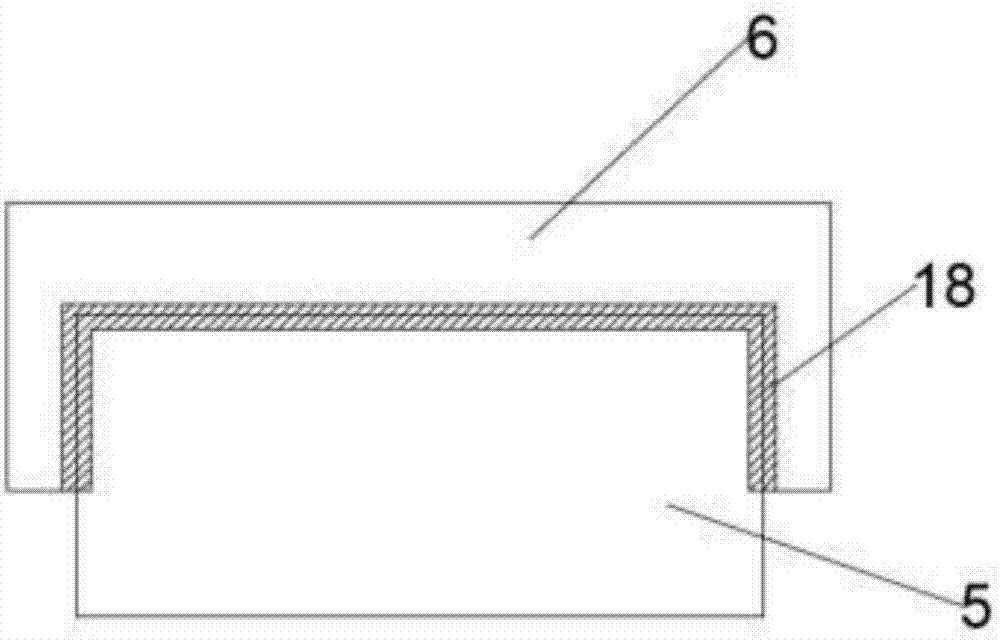
[0025] Such as figure 1 , Figure 4 and Figure 5 As shown, the clamping device 3 includes a guide rail 5, the guide rail 5 is fixed on the sub-base 2, and the guide rail 5 is provided with a slide seat 6, and the slide seat 6 is provided with a clamping seat 4, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More