An Unmanned Vehicle Obstacle Avoidance Method Based on Chance Constrained Model Predictive Control
A predictive control and constraint model technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of not considering the actual area occupied by the vehicle, not considering the uncertainty of the obstacle state, and the final model predictive control optimization Problems are not easy to find and other problems, to achieve the effect of ensuring safety and good environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
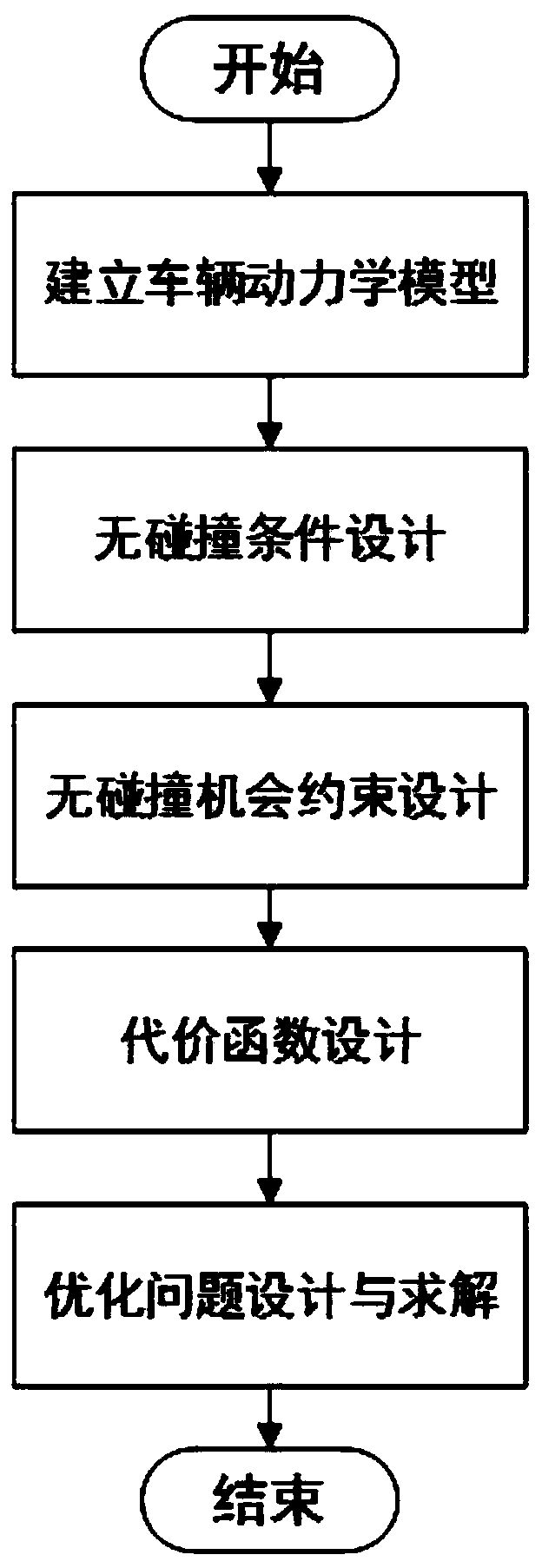
[0052] Such as figure 1 As shown, an unmanned vehicle obstacle avoidance method based on chance constraint model predictive control includes the following steps:
[0053] S1: Establish a vehicle dynamics model, which is used to describe the dynamic characteristics of unmanned vehicles:
[0054] The vehicle dynamics model is described as follows:
[0055]
[0056] Among them, the state vector and input vector are: with u=δ f , and Respectively represent the lateral velocity and longitudinal velocity in the body coordinate system, and the longitudinal velocity constant, is the roll angle, is the yaw rate, and respectively represent the lateral and longitudinal velocities in the global coordinate system, δ f is the front wheel rotation angle, a and b respectively represent the distance from the center of mass to the front axle, and the distance from the center of mass to the rear axle, C cf with C cr respectively represent the cornering stiffness of the fro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com