

Method for initializing surgical instrument in hands of surgical robot and corresponding device
A technology for surgical robots and surgical instruments, applied in the field of medical devices, can solve the problems of long time, insufficient precision, and complicated operations.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
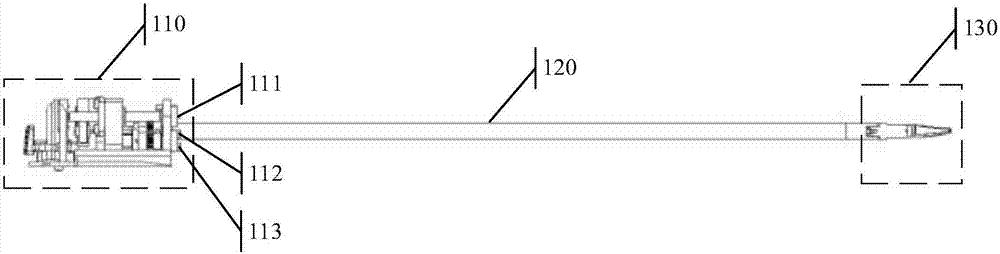
[0043] Embodiment 1. This embodiment of the present invention provides a method for initializing surgical instruments in a surgical robot. Wherein, the surgical robot may be operated remotely by the user to perform surgery, or may be a robot that performs surgery fully automatically, etc., which is not limited in the embodiment of the present invention. Surgical instruments can be installed on the surgical robot, as a part of the surgical robot, for example, the surgical robot can include a mechanical arm, then the surgical instrument can be installed on the mechanical arm, and for example, the surgical robot can include multiple mechanical arms, each At least one surgical instrument can be installed on the mechanical arm; and, the surgical instrument is a part of the surgical robot that directly acts on the patient when the operation is performed. In the specific implementation process, the surgical robot controls the movement of the surgical instrument through the control sy...
Embodiment 2
[0104] Embodiment 2, based on the same inventive concept, the embodiment of the present invention provides a surgical robot, the surgical robot includes a surgical instrument, and a control system connected with the surgical instrument, wherein the surgical robot, the control system and the surgical instrument can be the first embodiment The surgical robot, control system and surgical instrument. Therefore, for the description of the surgical robot, control system and surgical instruments, reference may be made to the description of the surgical robot, control system and surgical instruments in the first embodiment above.
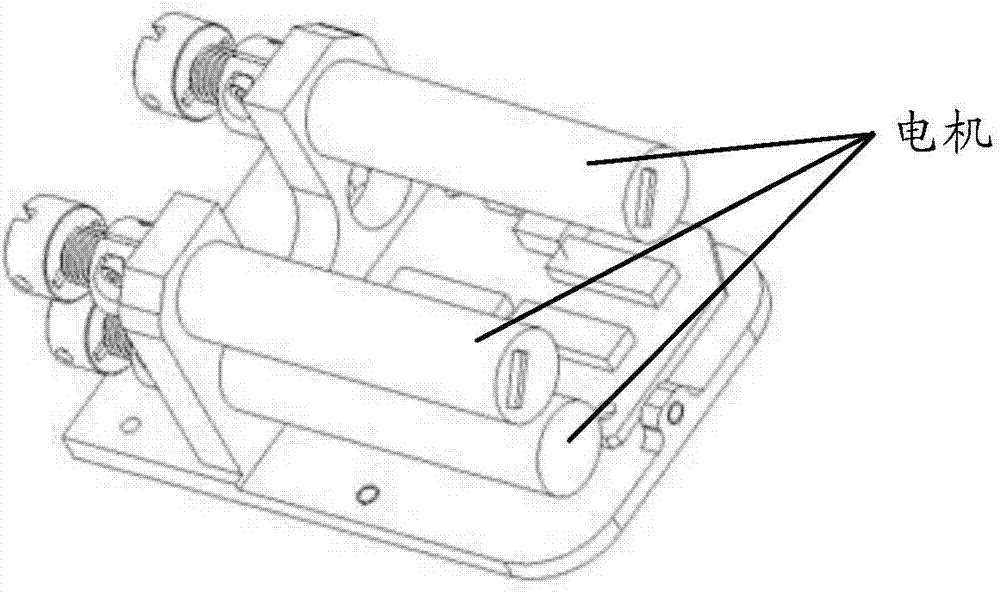
[0105] Wherein, the surgical instrument includes at least one set of driving and implementing components, and any driving and implementing component in the at least one set of driving and implementing components includes a motor and a transmission executing part mechanically connected with the motor.
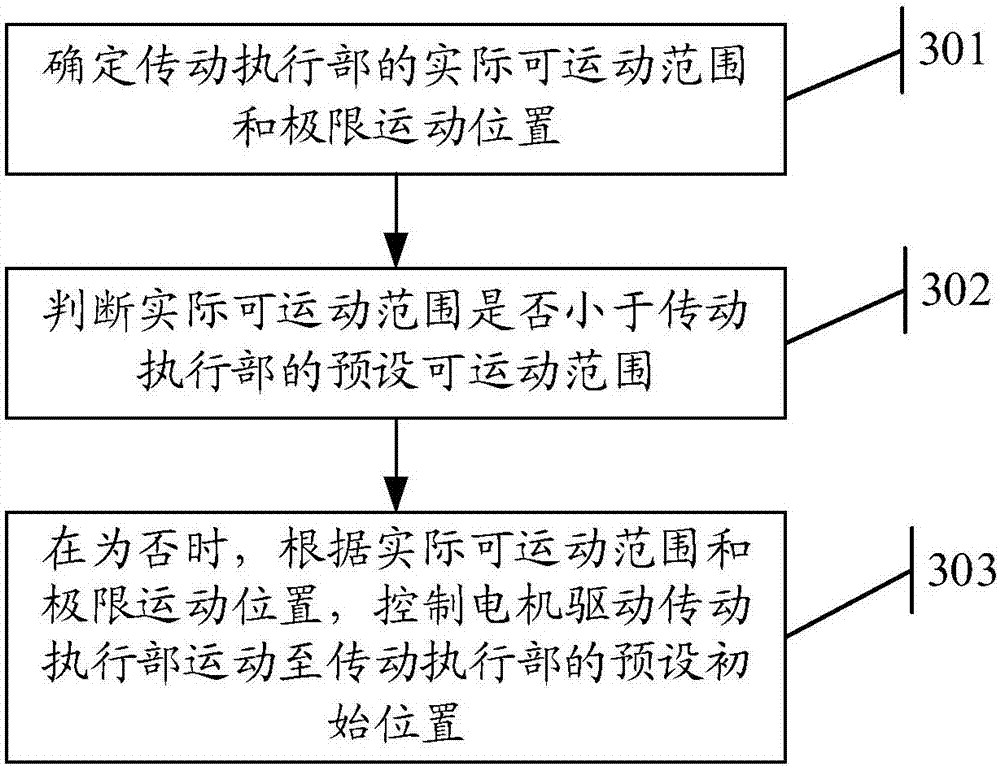
[0106] The control system is used to control any driving ...
Embodiment 3
[0111] Embodiment 3, based on the same inventive concept, the embodiment of the present invention provides a computer-readable storage medium, the computer-readable storage medium stores computer instructions, and when the computer instructions are loaded and run, it can perform the same as the first embodiment. A method for initializing surgical instruments in a surgical robot as described in . Moreover, for the specific implementation process when executing the method for initializing surgical instruments in the surgical robot, reference may be made to the description in Embodiment 1, and details are not repeated here.
[0112] In a specific implementation process, the computer-readable storage medium includes: a universal serial bus flash drive (Universal Serial Bus flash drive, USB), a mobile hard disk, a read-only memory (Read-Only Memory, ROM), a random access memory ( Random Access Memory, RAM), magnetic disk or optical disk and other media that can store program code. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More