

Three-legged wall-climbing robot
A wall-climbing robot and leg-type technology, which is applied in the field of wall-climbing robots, can solve the problems of inability to adsorb, the suction cup falls off, and the suction cup is unstable, and achieves the effects of coordinated movement and flexible steering.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
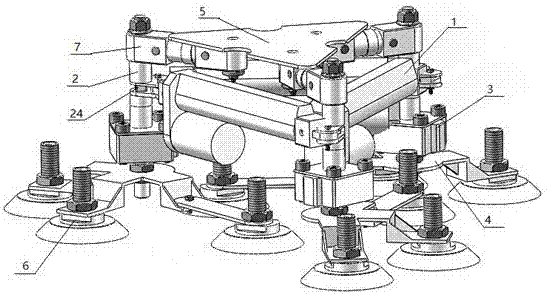
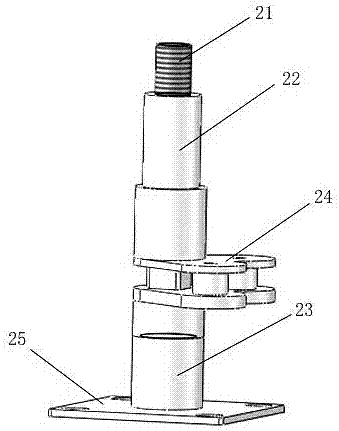
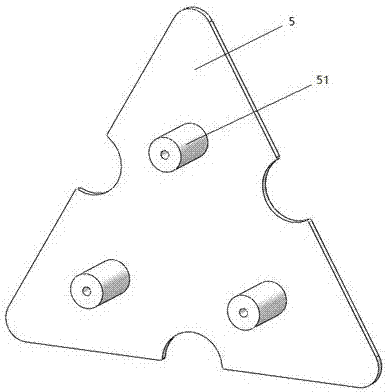
[0019] Such as figure 1 , figure 2 , image 3 and Figure 4 As shown, the present invention includes an electric telescopic rod 1, a motion joint shaft 2, a cylinder 3, a suction cup bracket 4, a suction cup 6 with a spring buffer, a loading platform 5, a shaft sleeve 7 and a control unit, and the end hole of the electric telescopic rod 1 It is movably connected to the pin clip 24 of the kinematic joint shaft 2, and three electric telescopic rods 1 are connected end to end to form a triangular structure on the kinematic joint shaft 2; the lower end of each kinematic joint shaft 2 is connected to a cylinder 3, and the bottom of the cylinder 3 is connected The suction cup bracket 4, the bottom of the suction cup bracket 4 is connected to the suction cup 6 with spring buffer; the journals 22 of the three kinematic joint shafts 2 are sleeved with the bushings...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More