

Sweeping robot cleaning method and chip
A sweeping robot and unsweeping technology, applied in the field of robotics, can solve the problems of low efficiency of supplementary sweeping, missed sweeping, and inability to meet the cleaning needs of complex environments
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0084] The specific embodiment of the present invention will be further described below in conjunction with accompanying drawing:
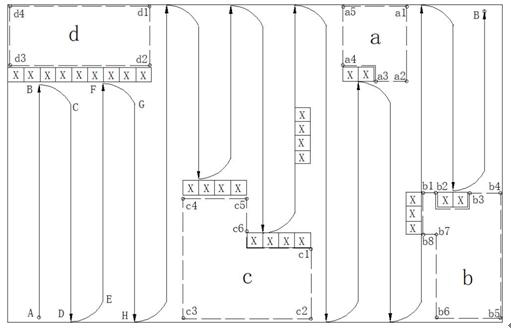
[0085] When the sweeping robot is cleaning, it will generally use the charging stand or some other point as the origin to start cleaning in a bow shape. The so-called bow-shaped cleaning means that when the robot travels straight along the straight-line path to the turning point, it turns to 90° and travels to a certain width, and then turns to 90° so that the current direction of travel is opposite to the direction of the original straight-line path, and then continues to move to next turning point. Because the trajectory of the robot in this way is similar to a bow, it is called bow-shaped cleaning. The turning point is a position point when the robot reaches the boundary of the area or detects an obstacle such as a wall that meets the turning condition.
[0086] Such as figure 1 As shown, the line with the arrow indicates the trajectory of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More