

Continuous frame based blind guiding instrument combination path planning method
A combined path and local path planning technology, applied in directions such as road network navigators, can solve problems such as unergonomic, blunt walking trajectories for the blind, and achieve improved applicability, a reasonable overall path planning method, and effective obstacle avoidance. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
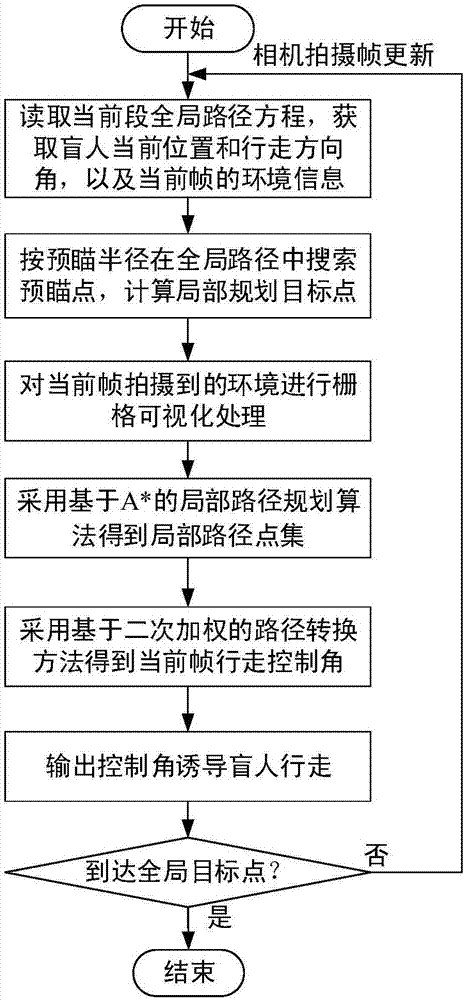
[0040] Such as figure 1 As shown, the overall flow of the present invention based on a continuous frame-based combined path planning method for blind guides includes the following steps:
[0041] (1) According to the obstacle avoidance requirements of the wearable visual guide system, when the position of the global target point is determined but the environmental information is unknown, a combined path planning method combining global path planning and local path planning is adopted;
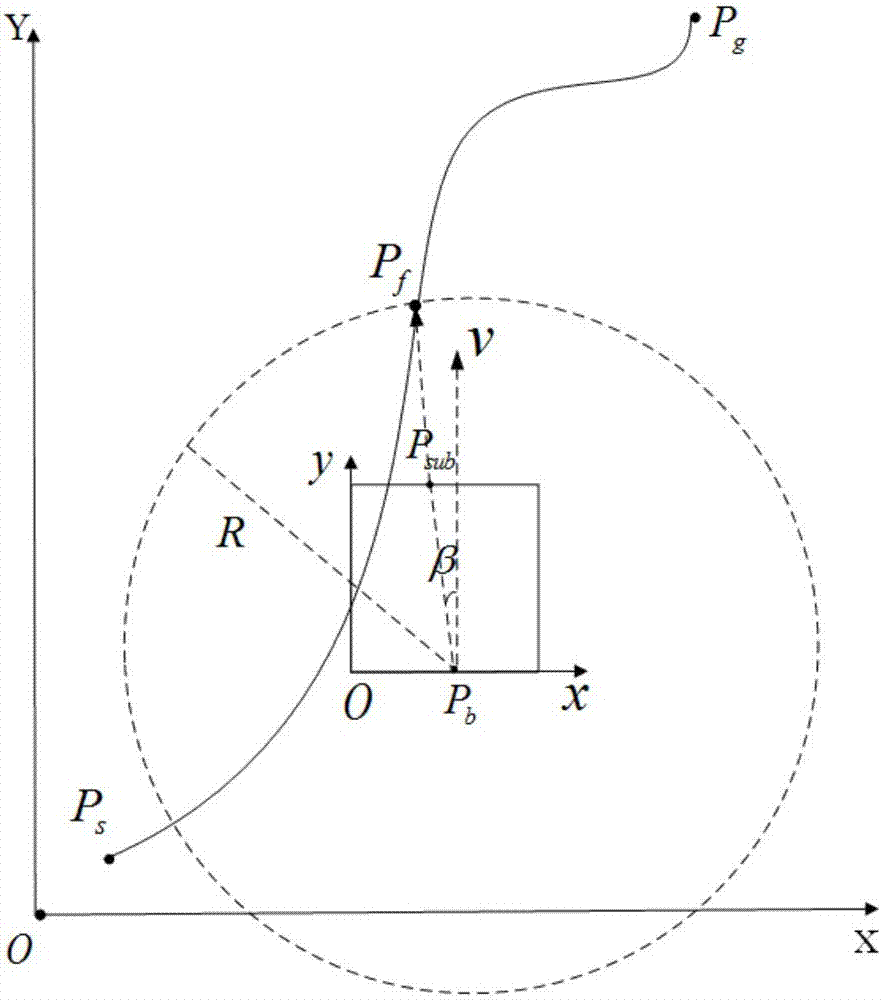
[0042] (2) On the basis of the global target point in step (1), first perform global path planning: the global path is obtained from the pre-stored GIS map search, and then at the current frame moment captured by the binocular camera, the position of the current point is calculated and obtained from Starting from the current point, the local planning target point is determined by previewing the global path;
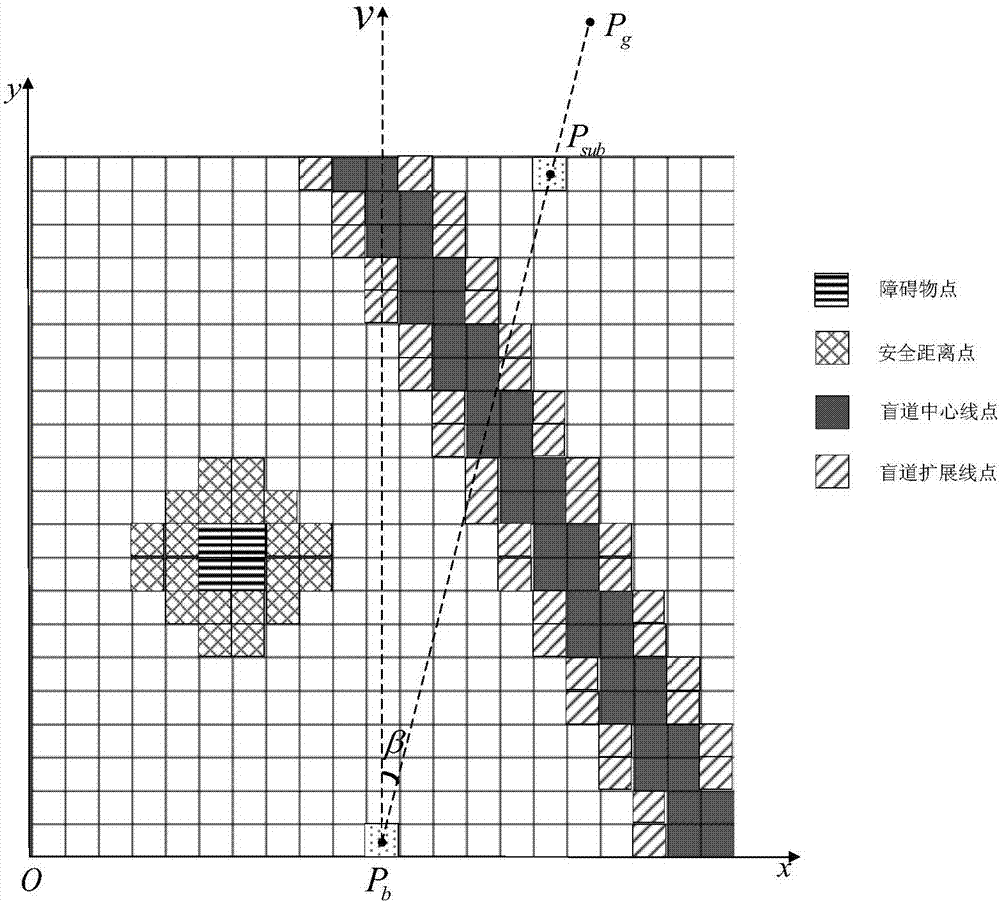
[0043] (3) On the basis of the local planning target points in step (2), perform loca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More