

Sweeping method and sweeping robot
A cleaning robot and robot technology, applied in the field of robots, can solve problems such as inappropriate setting of cleaning equipment, influence on edge sensor sensing, route deviation, etc., to achieve the effects of saving internal space and energy consumption, timely opening and closing, and saving electric energy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
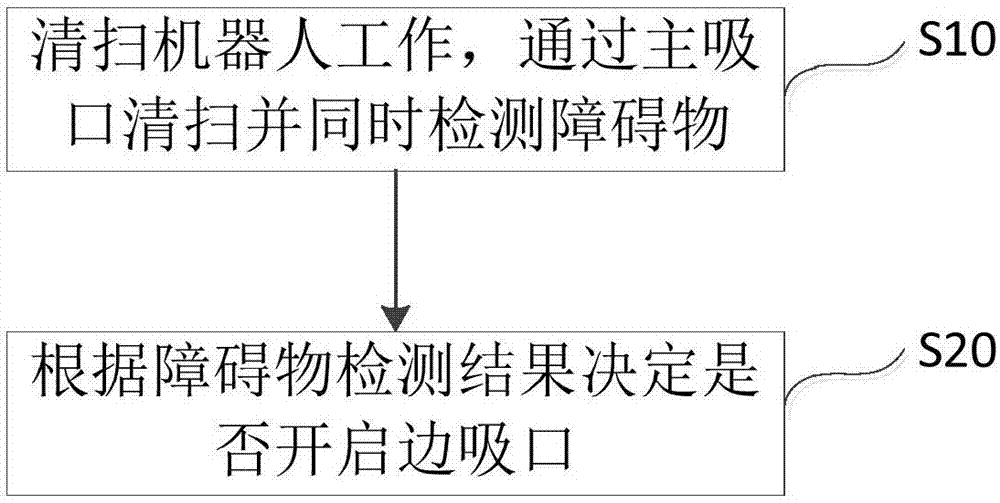
[0039] like figure 1 As shown, the present embodiment provides a cleaning method for a cleaning robot having a main suction port and a side suction port, and the method includes the following steps:
[0040] S10: The cleaning robot is working, cleaning through the main suction port and detecting obstacles at the same time;
[0041] In this step, the user starts the preset mode of the cleaning robot by pressing the button or remote control (such as automatic cleaning mode), and then opens the main suction port to perform the operation of cleaning while moving (due to the different mode settings, some cleaning robots It may be driving forward while rotating), and at the same time, the cleaning robot will start to detect the presence of obstacles.
[0042] S20: Determine whether to open the side suction port according to the obstacle detection result.
[0043] In this step, the cleaning robot does not detect any obstacles, and will maintain the previous working state; but if an...
Embodiment 2
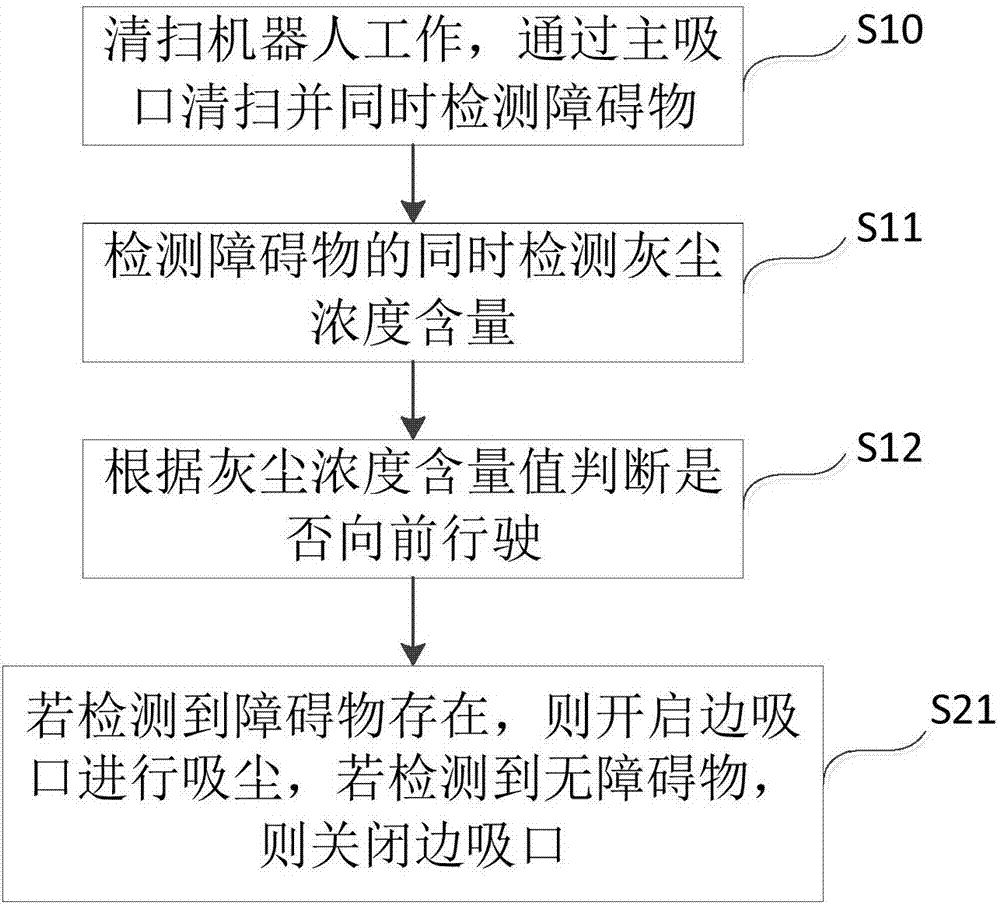
[0047] like figure 2 As shown, the difference between this embodiment and the previous embodiments is that this embodiment provides a more intelligent cleaning method, and the step S10 also includes:
[0048] S11: Detect the dust concentration while detecting obstacles;
[0049] In this step, the cleaning robot is also equipped with a dust concentration detection function. When detecting obstacles, it will also detect the dust concentration within the corresponding radius.
[0050] S12: Judging whether to drive forward according to the dust concentration value.
[0051]In this step, the cleaning robot receives the feedback of the dust concentration and compares it with the preset dust concentration threshold. If the feedback dust concentration is lower than the preset dust concentration threshold, the cleaning robot is controlled to move forward. If the feedback dust concentration is greater than or equal to If the dust concentration threshold is preset, the corresponding c...
Embodiment 3
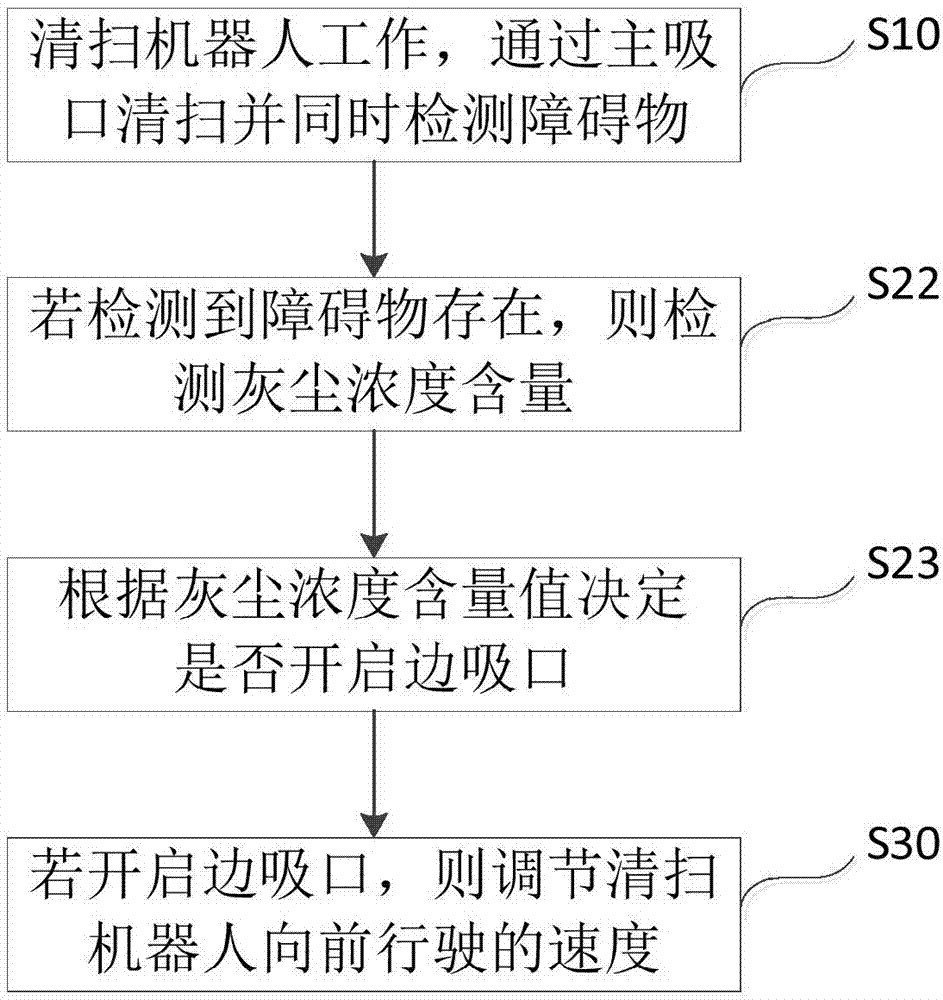
[0061] like image 3 As shown, the difference between this embodiment and Embodiment 2 is that this embodiment provides a cleaning method with a more prominent cleaning effect, wherein the dust concentration detection is not performed simultaneously with the obstacle detection, and the step S20 also include:
[0062] S22: If an obstacle is detected, detect the dust concentration;
[0063] In this step, if and only when the cleaning robot detects that there is an obstacle, the dust concentration detection function will be triggered, which is more energy-saving than the simultaneous detection of dust concentration and obstacle detection in Embodiment 2.
[0064] S23: Determine whether to open the side suction port according to the dust concentration value.
[0065] In this step, there are two trigger conditions for opening the side suction port. The first is that an obstacle is detected, and the second is that the dust concentration is greater than or equal to the preset dust ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More