

An intelligent omnidirectional AGV trolley and its control method
A small car and intelligent technology, applied in the direction of position/direction control, vehicle position/route/height control, control/regulation system, etc., can solve the problems of human injury, achieve the effect of prolonging service life, reducing costs, and saving space routes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
[0065] Embodiment 2 This embodiment provides another implementation of an intelligent omnidirectional AGV trolley, the technical solution of which is the same as that of Embodiment 1, and the specific settings also include:
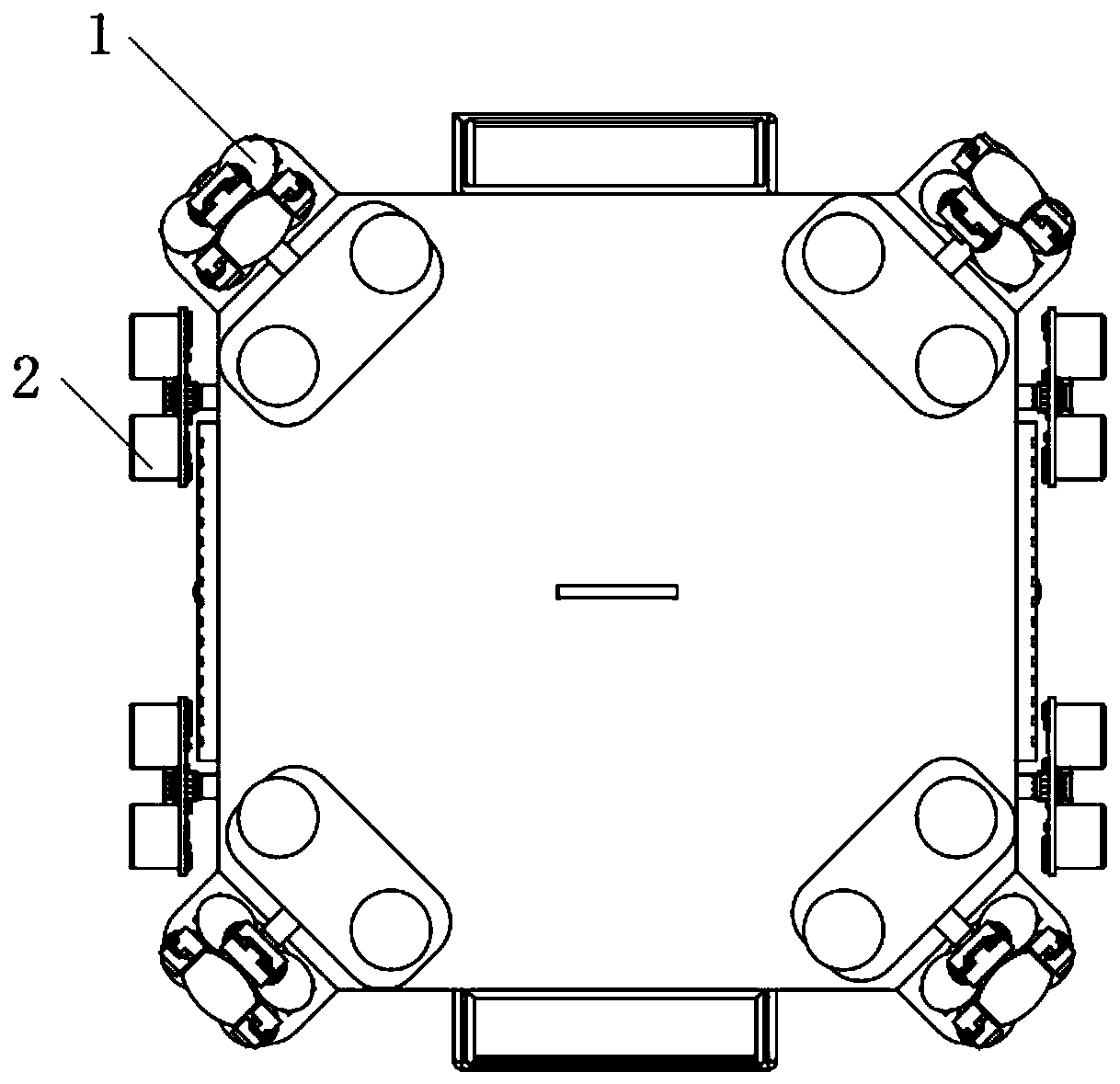
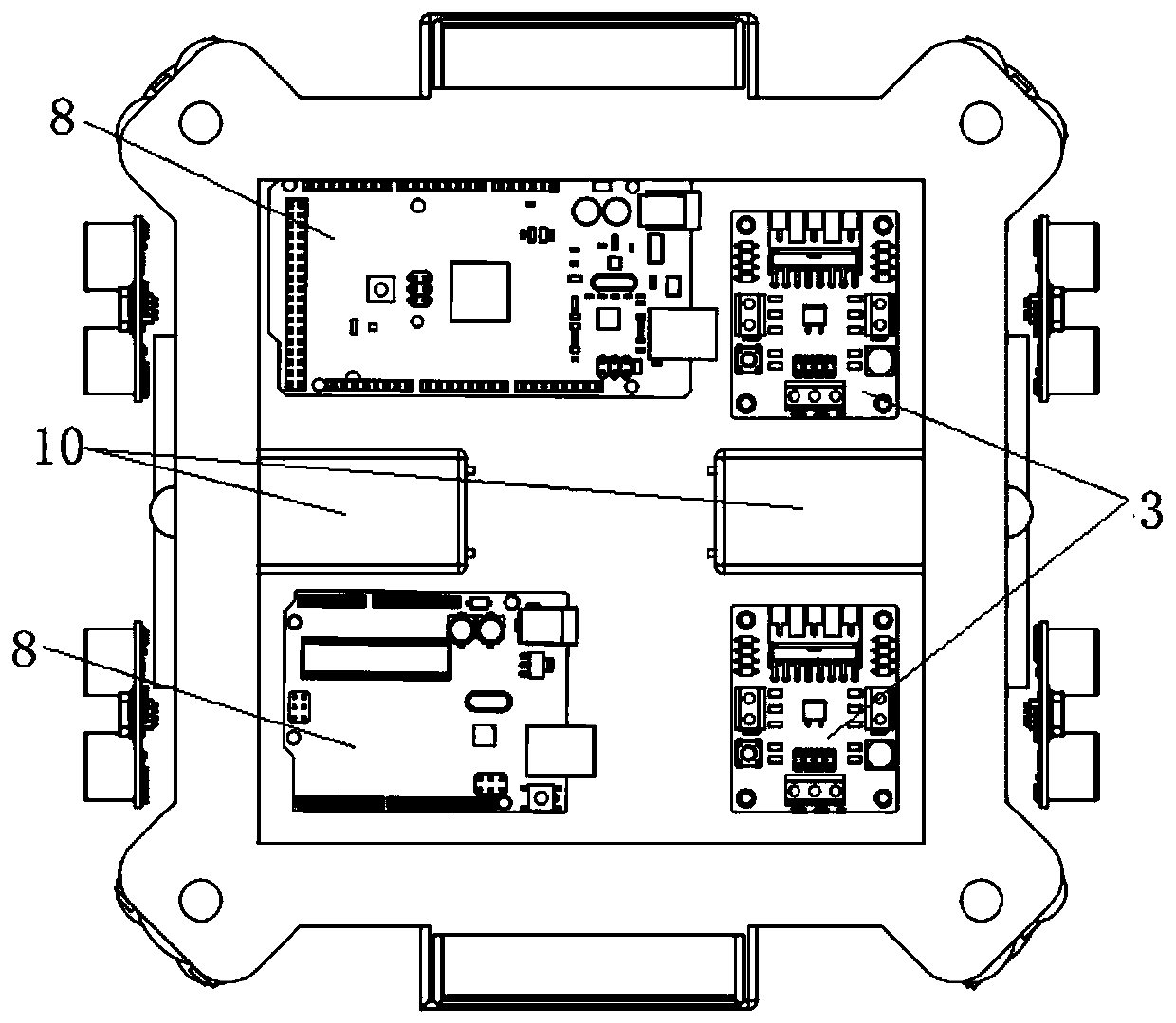
[0066] The main control unit 8 is composed of a UNO module and a mega2560 controller, wherein the UNO module is connected to the navigation sensor unit 7, the UNO module receives the signal sent by the 16-bit navigation sensor unit 7, and the 16-bit magnetic navigation sensor used in the navigation of the AGV The unit can accurately detect the position of the magnetic strip, so that the AGV will not deviate from the track during operation.
[0067] In addition, in order to reduce the CPU computing resources of the mega2560 main control board and improve the overall performance of the system, an Arduino UNO control board is added for auxiliary calculation to collect 16-bit magnetic navigation sensor signals.
[0068] The control program is encapsulated in ...
Embodiment 3
[0072] Embodiment 3 This embodiment provides a third implementation of an intelligent AGV omnidirectional trolley, and its technical solution is as in Embodiment 2. During the specific implementation process, it also includes:
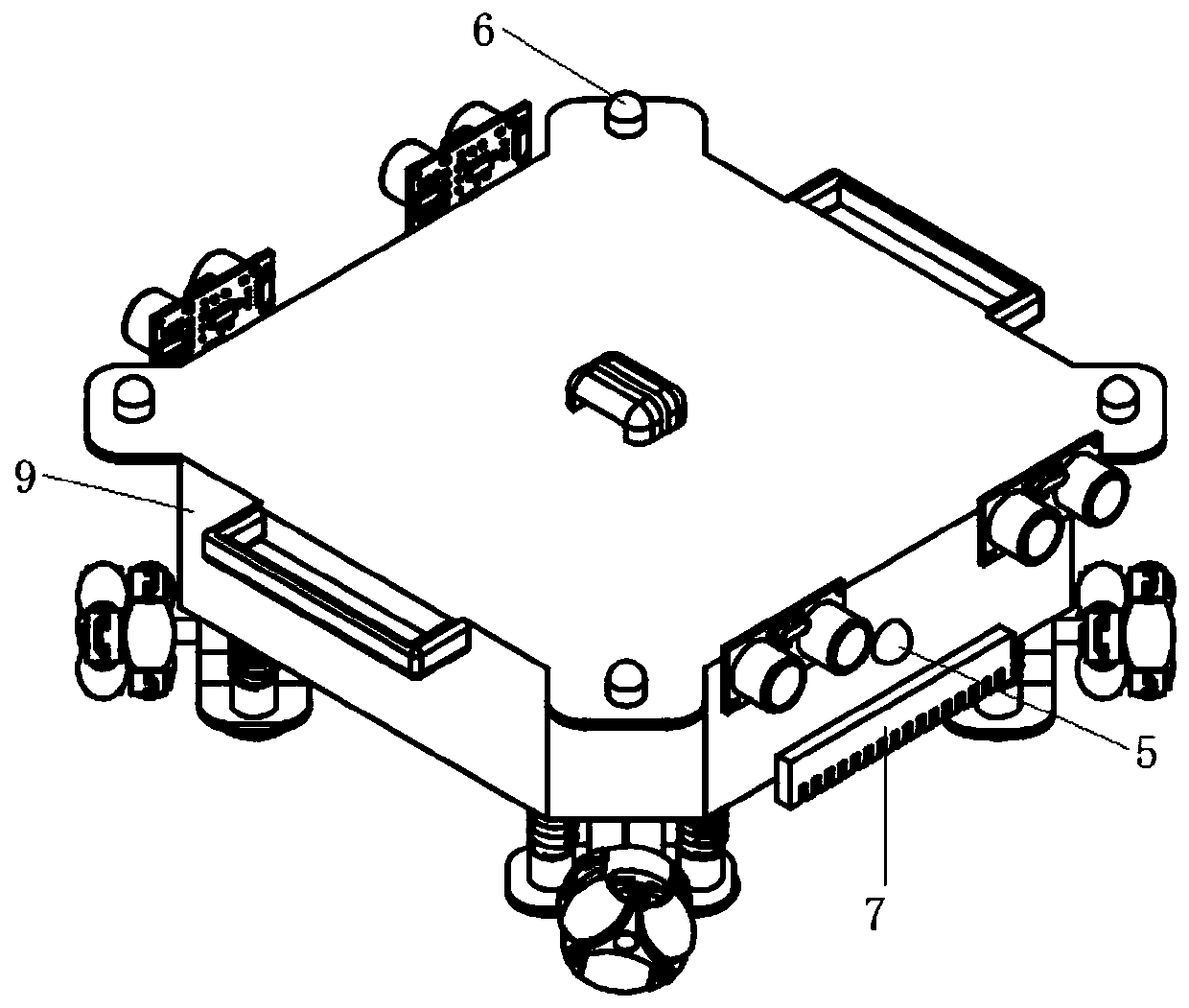
[0073] The driving device adopts a spring anti-vibration device, the motor unit 4 and the omnidirectional wheel unit 1 are fixed, the spring is sleeved on the cylinder, and the wheel train is sleeved on the cylinder for connection;
[0074] as follows Figure 8 As shown, the spring anti-vibration device is to put the spring on the cylinder on the shell of the AGV. Figure 4 The parts are installed in the motor and then inserted into the cylinder. The top of the cylinder is threaded and connected with nuts. The spring supports the parts. If vibration occurs, the universal wheel will slide on the cylinder. This assembly is helpful shockproof.
[0075] The above methods help to protect the carried items from being dumped during operation, reduce the vib...
Embodiment 4
[0080] Embodiment 4 This embodiment provides an intelligent omnidirectional AGV car control method, including
[0081] The first step is to send a signal to the AGV car through the remote control, and the main control unit 8 of the AGV car decodes the sent information and runs the corresponding command;
[0082] If the stop signal is sent, the AGV car will stop;
[0083] If the signal sent is to run to the specified position, the AGV car will start the running self-check;
[0084] In the second step, the AGV trolley receives the control instruction that the trolley runs to the specified position, and the main control unit 8 judges the forward direction in the following manner:
[0085] According to the intersecting control algorithm, the magnetic navigation sensor of the navigation sensor unit 7 at the front lower middle part of the compartment 9 detects the number a, and the magnetic navigation sensor of the navigation sensor unit 7 at the rear lower middle part of the compa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More