

Comprehensive moving robot
An all-round mobile and robotic technology, applied in the field of robotics, can solve problems such as the gap between multi-system robots to cooperate with each other to complete tasks, and achieve the effects of narrow steering range, compact structure, and high transmission efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
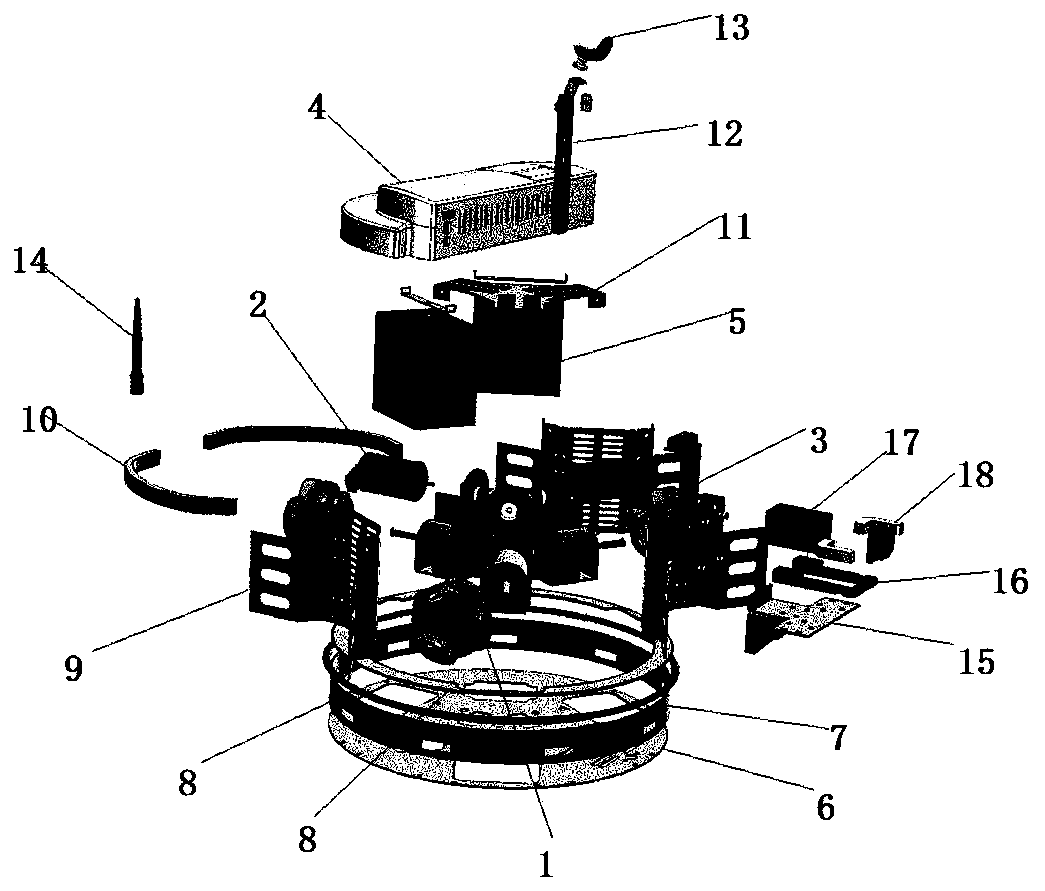
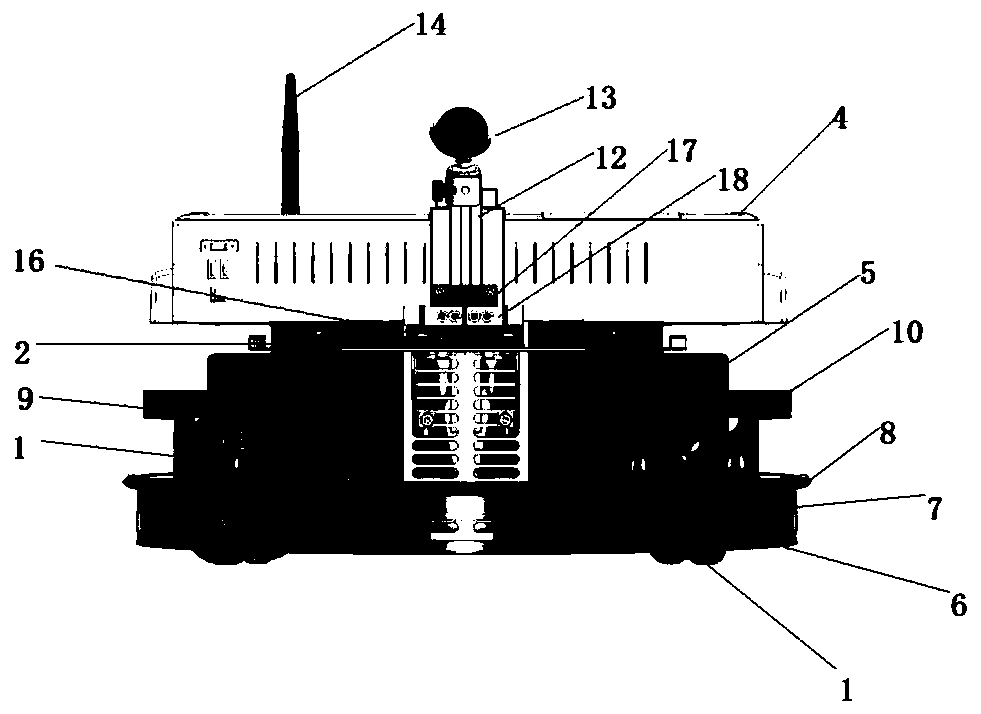
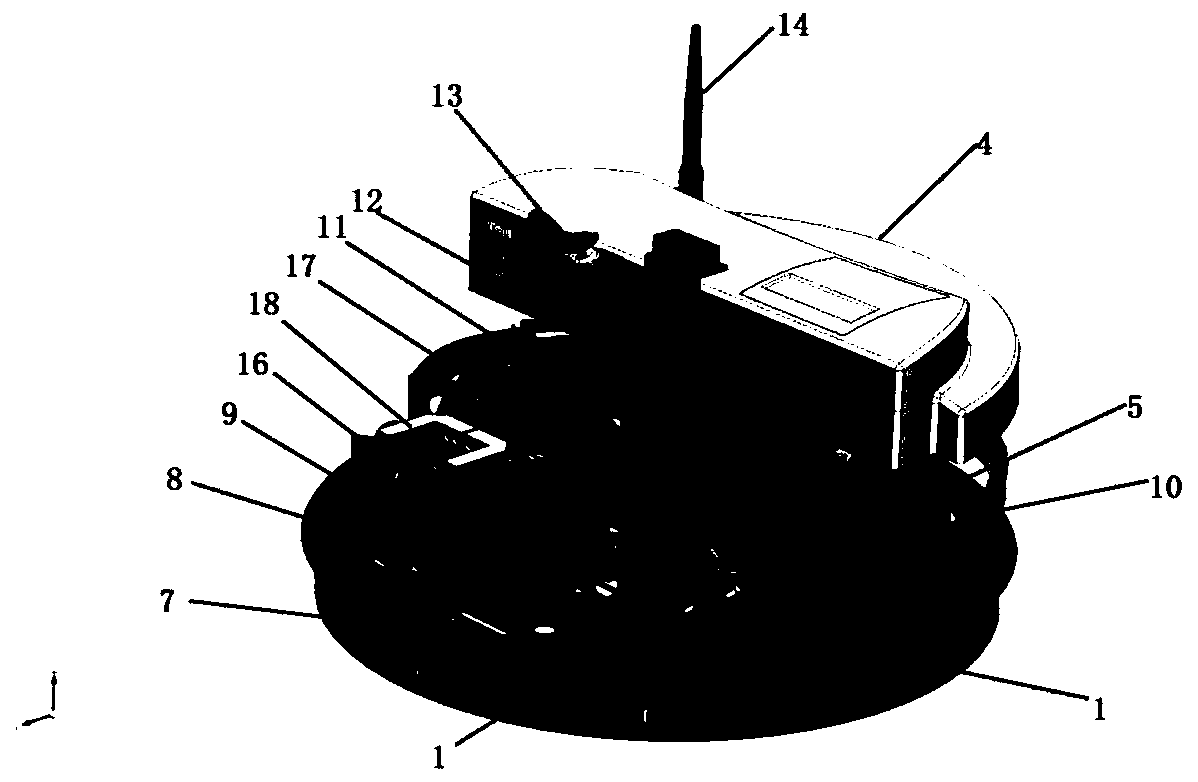
[0060] see Figure 1-11 , an all-round mobile robot, including a drive mechanism and a mechanical frame; the drive mechanism provides multiple groups, each group includes a motor 2 and a reduction mechanism 3 connected with the motor 2, and the reduction mechanism 3 is connected with a universal wheel 1 The motor 2 of the drive mechanism is connected to the controller 4 through wires; the mechanical frame includes a circular chassis 6 at the bottom, and the chassis 6 is provided with a plurality of through holes, and the edge of the chassis 6 is connected with an annular baffle 7, the A retaining ring 8 is connected above the annular baffle 7; the multiple groups of driving mechanisms are connected by a plurality of driving baffles 9, and the driving baffle 9 is snapped with the retaining ring 8; the driving baffle 9 is vertically in the middle A battery holder 10 is connected, and a battery 5 is arranged inside the battery holder 10; a controller 4 is connected to the battery...
Embodiment 2
[0076] The difference from Embodiment 1 is that the reduction mechanism 3 is a transmission system composed of a motor 2, a planetary transmission gear, and a synchronous belt 19; the input power of the 2 shafts of the motor is P (unit: watt W); the speed of the motor 2 n (unit rpm); torque is T (unit is N / cm); then described P, n, T satisfy the following relational formula:
[0077] P=α*(n / T);
[0078] The above expression α is a relationship factor, and its value range is 0.036-6.761.
[0079] The transmission power range is controlled by the above expression, the transmission efficiency is improved, the transmission power range is large, and the axial dimension is small. The synchronous belt 19 has accurate transmission ratio, small force on the shaft, compact structure, good wear resistance and aging resistance.
[0080] Preferably, the universal wheel 1 runs through the through hole provided by the chassis 6; the drive mechanism is arranged in three groups, including th...
Embodiment 3
[0086] The difference from Embodiments 1 and 2 is that the robot uses a video acquisition system and a distance detection sensor to cooperate together; the video acquisition system identifies the track line and another robot identifies the color card; the identification process is controlled by a program and automatically Plan your walking route.
[0087] The main logical relationship of the program is to calculate the rotation speed of the controller 4 by calling the sensor identification module and importing the memory for analysis and processing, and to change the direction by adjusting the different rotation speeds of the three motors 2 . Cooperate with the distance sensor to define the distance between the two robots; thus, the robot can walk in queue by identifying the color card and track line.
[0088] In the program of identifying trajectory lines, the video module of the mobile robot is called first, and the video module is output to the line type recognition module ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More