Unmanned obstacle crossing vehicle
A frame and wheel technology applied to unmanned obstacle-crossing vehicles. In the field, it can solve the problems of poor maneuverability, low terrain adaptability and obstacle crossing ability, and low efficiency, and achieve the effect of improving passability, improving maneuverability and flexibility, and high transmission efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
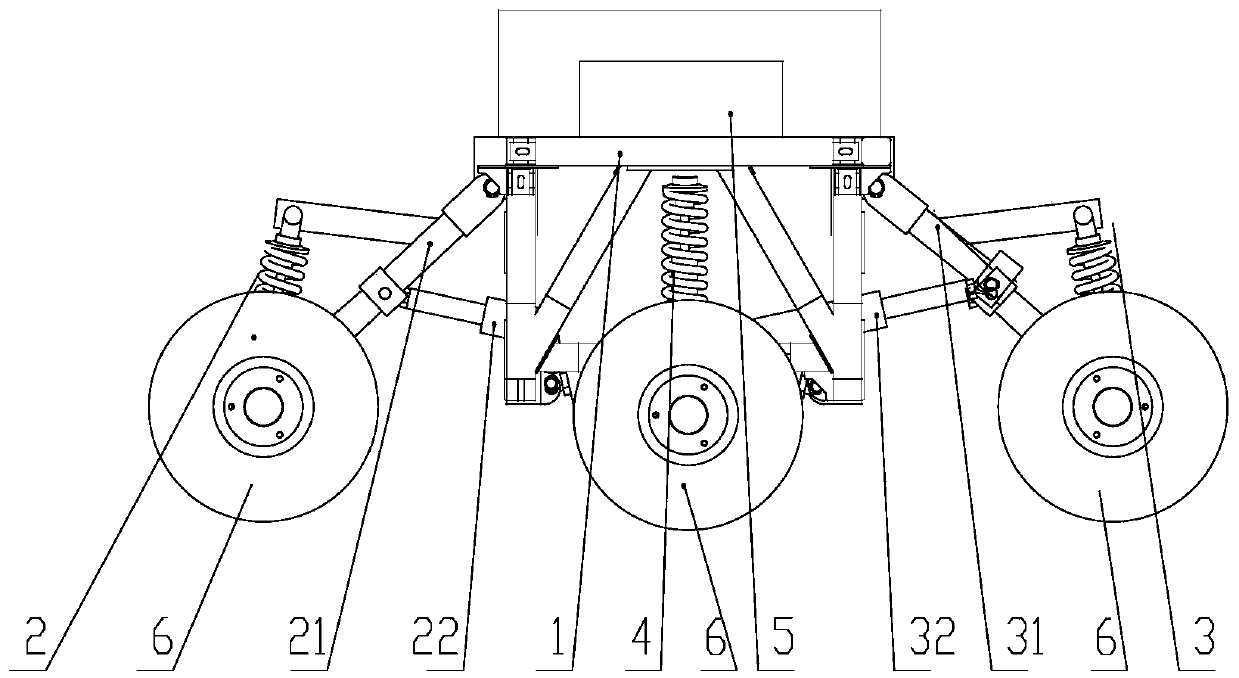
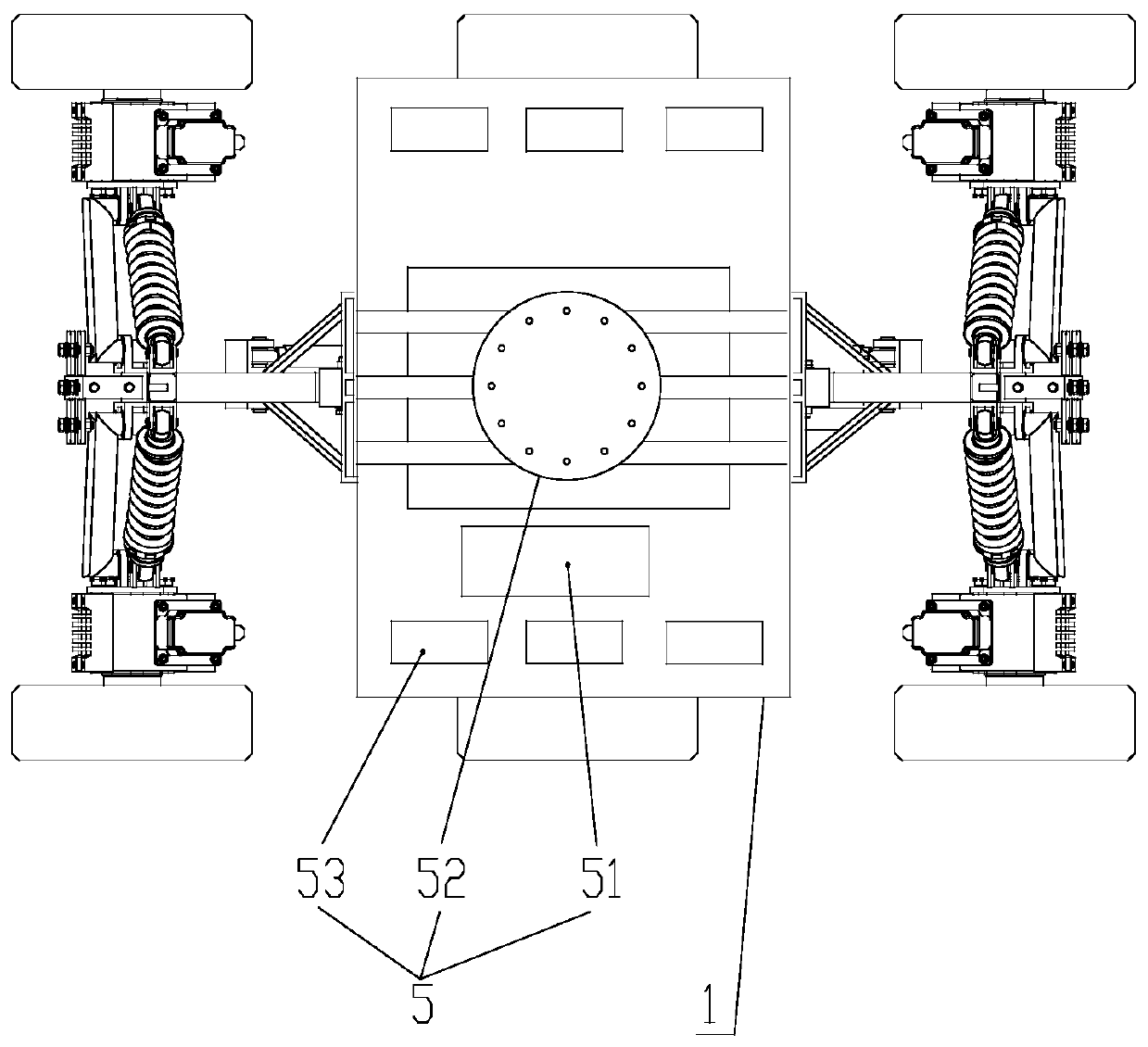
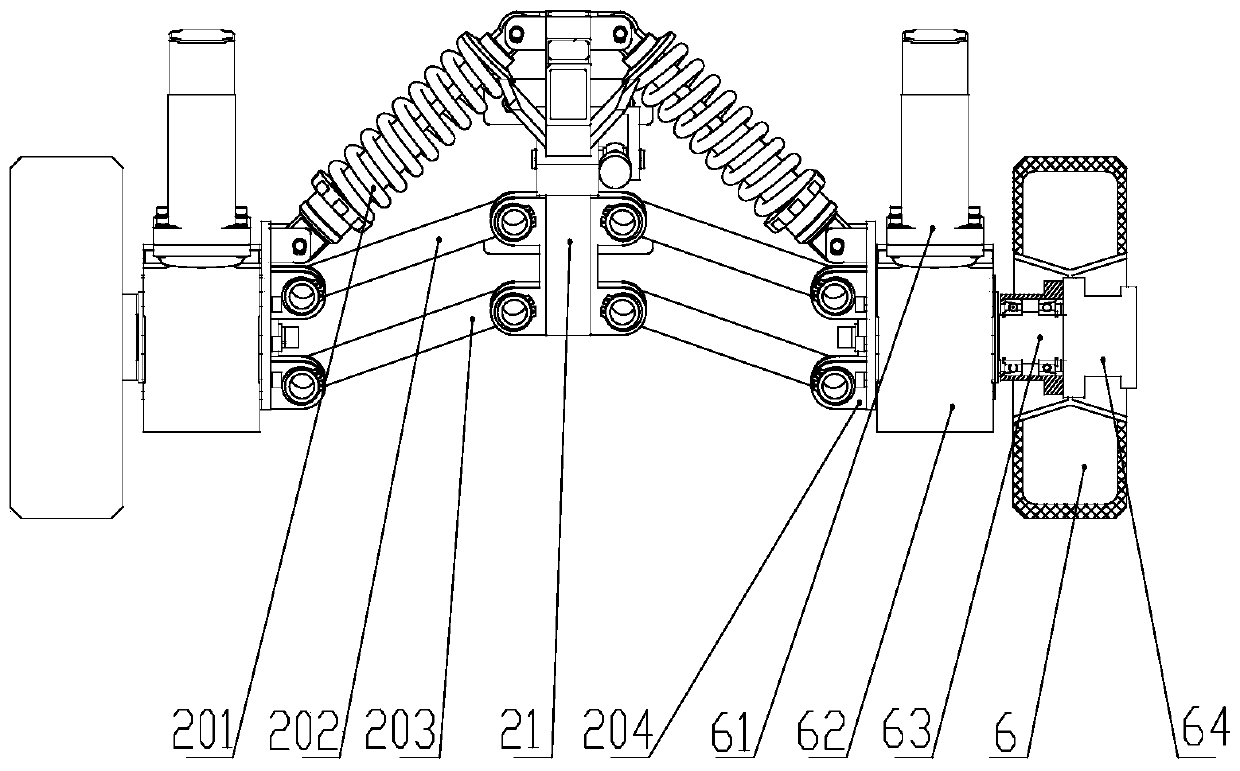
[0034] see figure 1 and figure 2 , the unmanned obstacle-crossing vehicle in the illustration is a preferred solution of the present invention, specifically including a vehicle frame 1, a front suspension 2, a rear suspension 3, an intermediate suspension 4, a drive system 5 and wheels 6; wherein six groups of wheels 6 The front, middle and rear layouts are arranged on the bottom of the vehicle frame 1 through the front suspension 2, the middle suspension 4 and the rear suspension 3 respectively to form a six-wheel walking chassis of an unmanned obstacle-crossing vehicle, wherein the front suspension 2 and the rear suspension The suspension 3 can adjust the swing angle relative to the frame 1, which is convenient for the unmanned obstacle-crossing vehicle to actively adapt to different terrains. The middle suspension 4 is installed in a conventional way relative to the frame 1. The swing angle cannot be adjusted, but it still has a conventional suspension For shock absorptio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More