

Pipeline robot with adjustable crawler belt angle
A pipe robot and adjustable technology, applied in tracked vehicles, special pipes, motor vehicles, etc., can solve problems such as construction, difficult inspection and operation, and water flow
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The core of the present invention is to provide a pipeline robot, which can complete remote detection and operation functions in complex pipeline environments. In order to enable those skilled in the art to better understand the solution of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
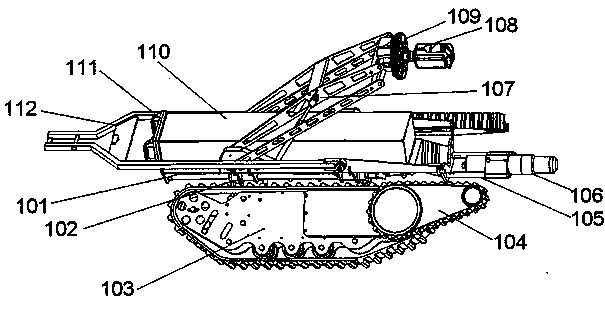
[0039] figure 1 It is a schematic diagram of the main structure of the pipeline robot of the present invention. As shown in the figure, the pipeline robot includes: frame 101, left main crawler assembly 103 and right main crawler assembly 103, crawler angle adjustment mechanism 102, front left auxiliary crawler assembly 104 and front right auxiliary crawler assembly 104, sonar fixed Frame 105, sonar probe 106, camera elevating frame 107, camera unit 108, auxiliary light source 109, electronic control box 110, electronic control box drawing door 111 and cable traction frame 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More