

Collision avoidance trajectory planning method and device based on articulated arm robot
A trajectory planning, articulated arm technology, applied in instruments, manipulators, control/adjustment systems, etc., can solve the problem of low overall operation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
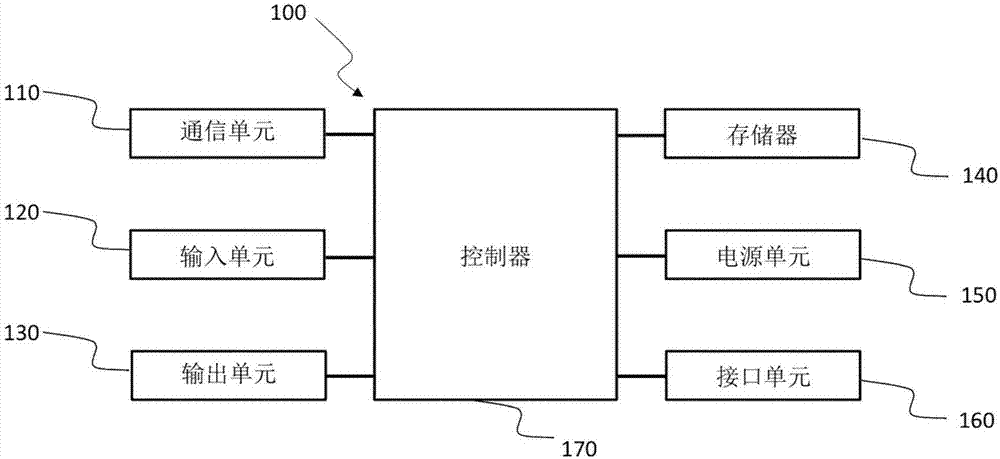
[0061] Apparatus for implementing various embodiments of the present invention will now be described with reference to the accompanying drawings. In the following description, use of suffixes such as 'module', 'part' or 'unit' for denoting elements is only for facilitating description of the present invention and has no specific meaning by itself. Therefore, "module" and "component" may be used mixedly.
[0062] The collision avoidance trajectory planning method and device based on the articulated arm robot can be implemented in various forms. For example, the processing method and apparatus described in the present invention may include various equipment terminals. In the following, it is assumed that the device is a kind of fixed equipment terminal. However, those skilled in the art will understand that the confi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More