

Real-time estimation method for road slope under comprehensive driving conditions
A technology of road slope and slope, which is applied in the field of real-time estimation of road slope, can solve problems such as difficulty in obtaining the magnitude of braking force, lack of installation to measure the magnitude of braking force, and complex braking conditions, so as to expand the application range and improve vehicle assistance The effect of driving controls
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
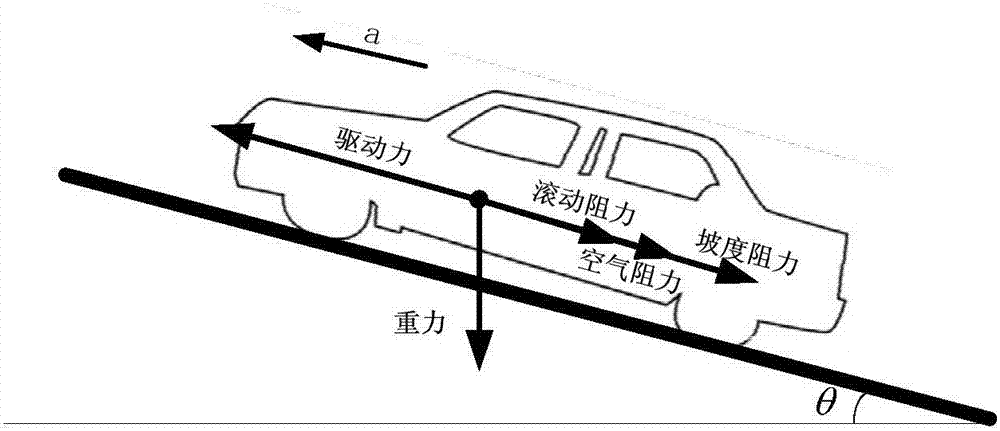
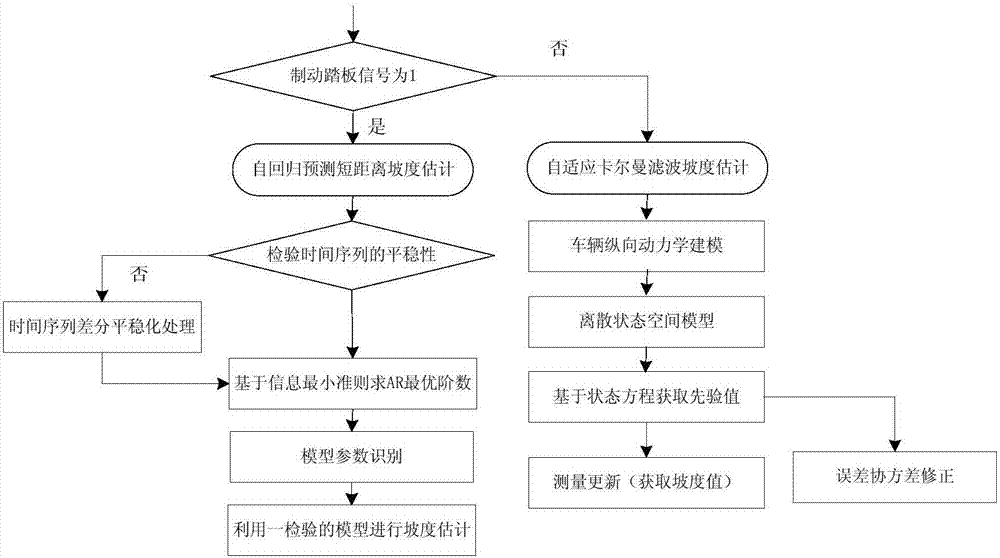
[0057]During the driving process of the vehicle, the driving conditions often change due to the environment, which can be roughly divided into two types of driving conditions: driving and braking. For driving driving conditions, the slope estimation is realized by modeling the longitudinal dynamics mechanism of the vehicle and constructing an adaptive extended Kalman filter estimation method. For braking driving conditions, the autoregressive prediction algorithm is used to predict the slope based on the historical data of the slope in view of the short braking distance in general driving conditions. Combining the two estimation methods, the slope estimation under comprehensive driving conditions can be realized based on OpenXC, thereby expanding the scope of application of slope estimation. This embodiment adopts a real-time estimation method of road slope suitable for comprehensive driving conditions, as shown in the figure, including the following four steps:
[0058] Step...
Embodiment 2
[0069] In this embodiment, the vehicle driving state data collected by OpenXC is used to realize the dynamic estimation of road slope under comprehensive working conditions by combining two estimation algorithms; the following steps are described in detail:
[0070] Step 1: Build a data collection platform based on OpenXC to obtain vehicle driving status data
[0071] The overall structure of the vehicle real-time data acquisition system is as follows: figure 1 As shown, the vehicle control modules such as the power system and the body system are equipped with sensors for detecting vehicle speed and torque, and are connected to the ECU electronic control unit. The electronic control unit realizes data communication through the CAN bus and transmits the data to the OBD-II interface. In the embodiment, the OpenXC provided by Ford Motor Company of the United States is a hardware module developed based on the OBD-II protocol. Therefore, the real-time vehicle status data can be rea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More