Variational baseline binocular vision inertia speedometer and method thereof
A binocular vision and odometer technology, applied in the field of metrology, to achieve the effect of improving positioning accuracy and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further explained below in conjunction with the drawings.
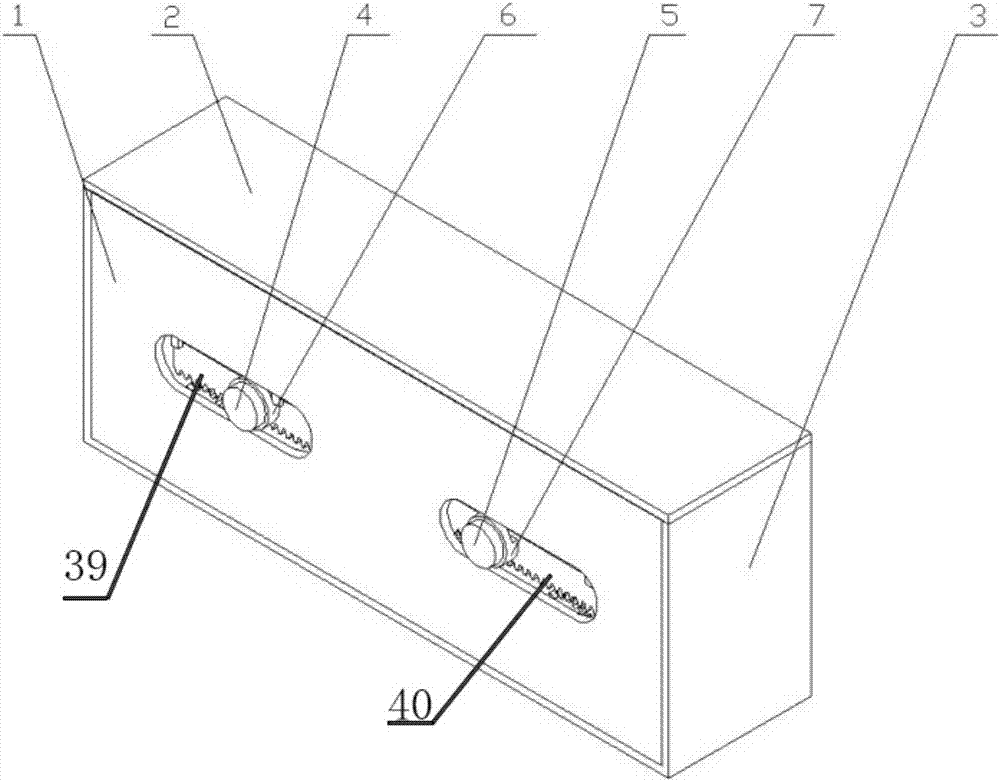
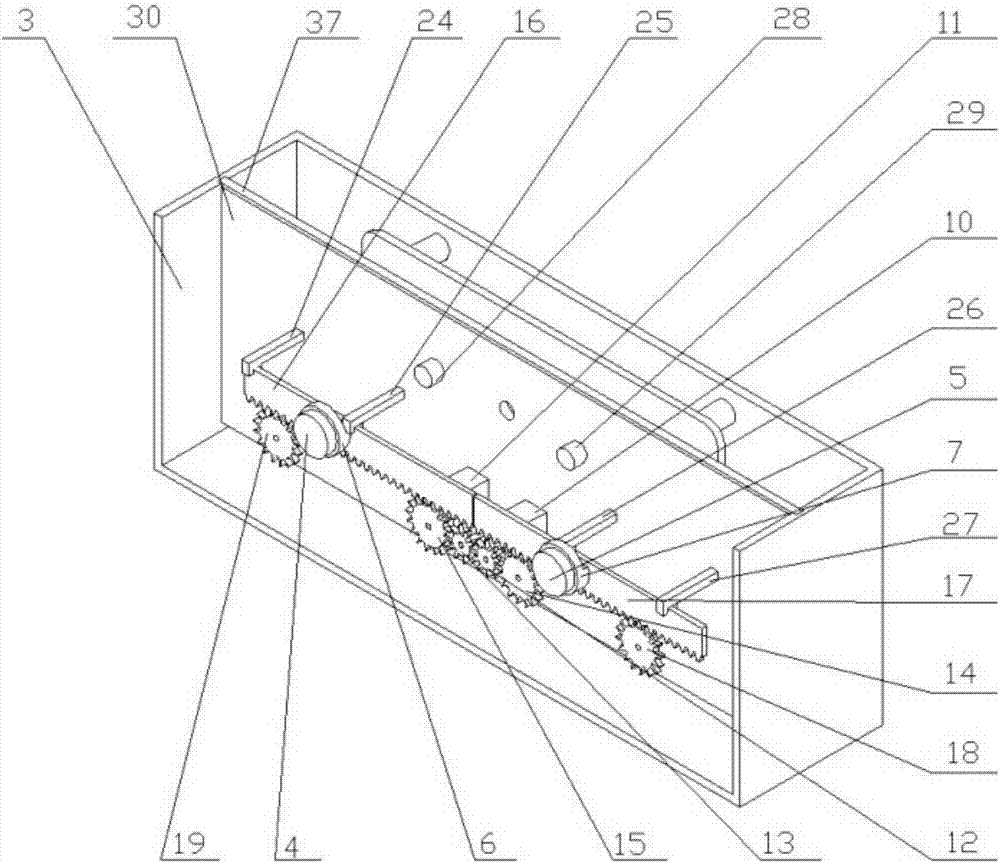
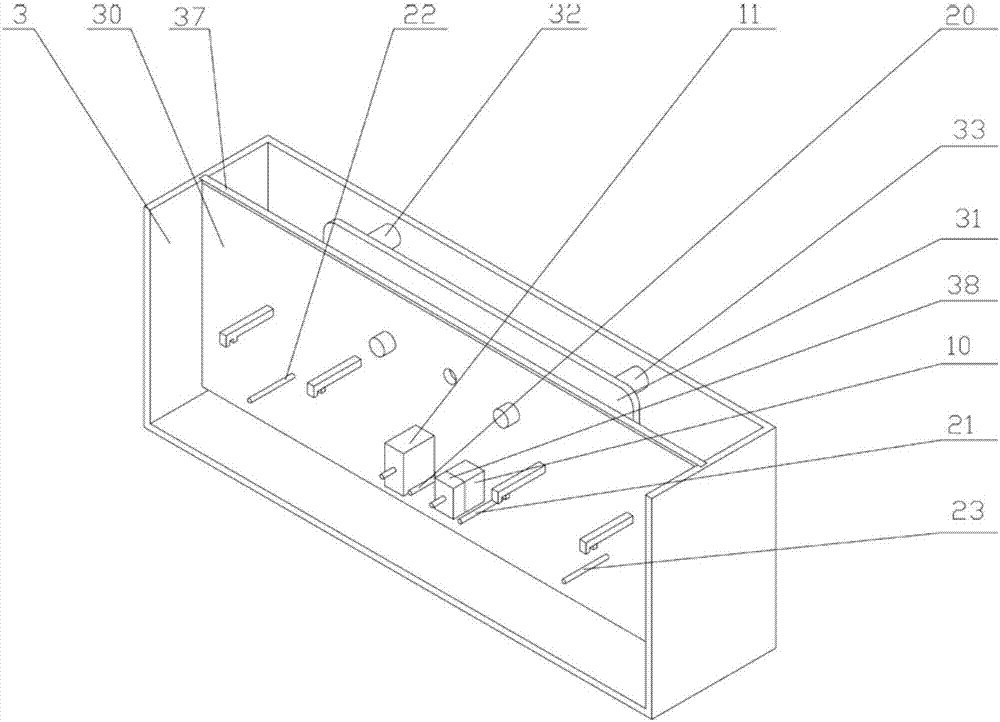
[0036] Such as Figure 1-7 , A variable baseline binocular visual inertial odometer, comprising a housing 3, a support board 30, a control board 31, and a switch 36, wherein:
[0037] The housing 3 is a rectangular parallelepiped with a cavity inside, which includes a front panel 1, an upper panel 2. The front panel 1 of the housing 3 is provided with a long left window 39 and a right window 40, a left window 39 and a right window The left camera 4 and the right camera 5 are respectively placed in 40, and the left camera 4 is installed on the left base 6, the left base 6 is installed on the left rack 16, the right camera 5 is installed on the right base 7, and the right base The seat 7 is mounted on the right rack 17; the left rack 16 meshes with a fourth gear 15 and a sixth gear 19, and the right rack 17 meshes with a third gear 14 and a fifth gear 18;
[0038] The support plate 30 is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More