

A real-time image stitching method based on a circular pipe robot
A working robot, real-time image technology, applied in image enhancement, image analysis, graphic image conversion, etc., can solve the problems of not commonly used circular pipe working robots, etc., and achieve the effect of easy calculation and processing, improved calculation efficiency, and high stitching efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
[0045] like figure 1 and figure 2 Shown is a real-time image mosaic method based on a circular pipe operation robot proposed by this application, including:
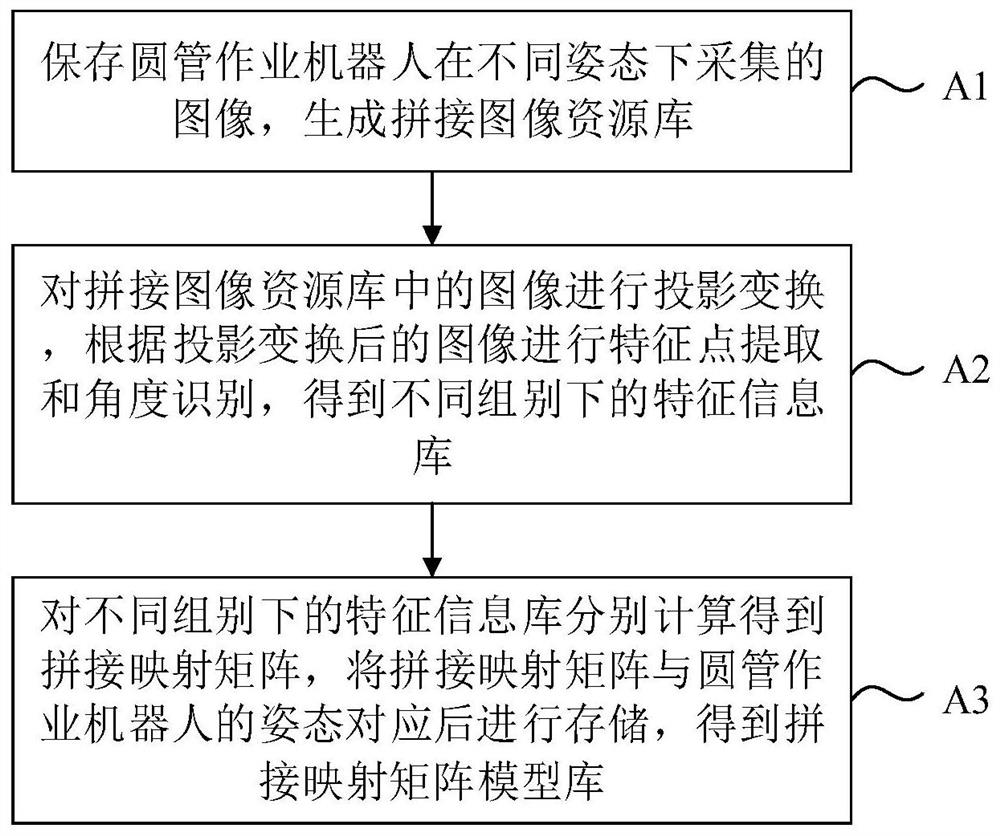
[0046] The step of building the splicing mapping matrix model library is to perform projection transformation on the images collected by the circular pipe operation robot in different postures, calculate and record the splicing mapping matrix corresponding to each posture according to the projection transformation results, and obtain the splicing mapping matrix model library;
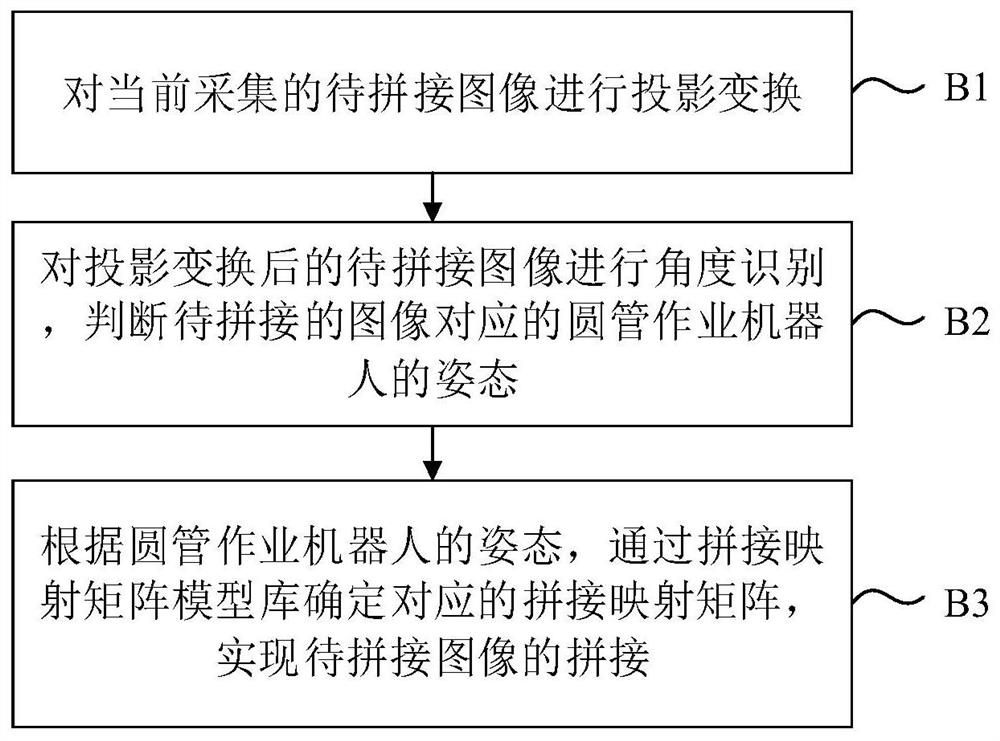
[0047] The real-time image stitching step is to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More