

Freeway vehicle compulsive lane change proportional hazard model
A proportional hazard model and vehicle technology, applied in the field of traffic engineering, can solve problems that have not been used to study the forced lane-changing behavior of expressway vehicles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment approach
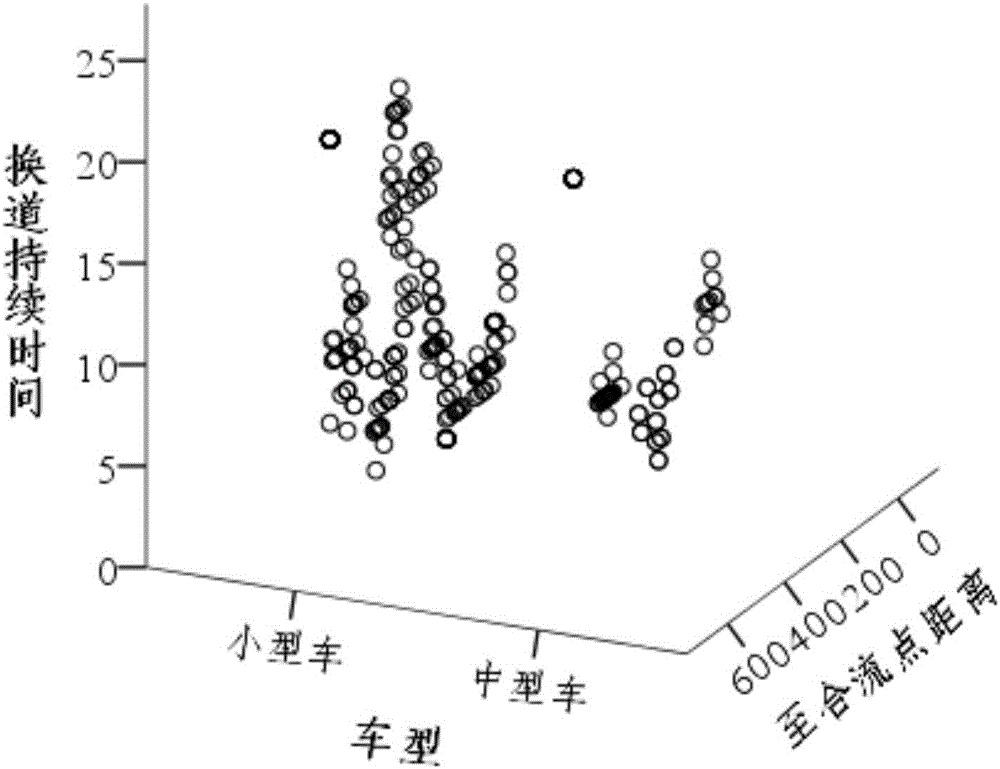
[0015] Firstly, calculate the duration model of the road vehicle's forced lane change: Let T represent the target vehicle's lane change duration, which is a non-negative random variable. Its cumulative distribution function is
[0016]
[0017] where f(x) is the probability density function of T, which can be expressed as
[0018]
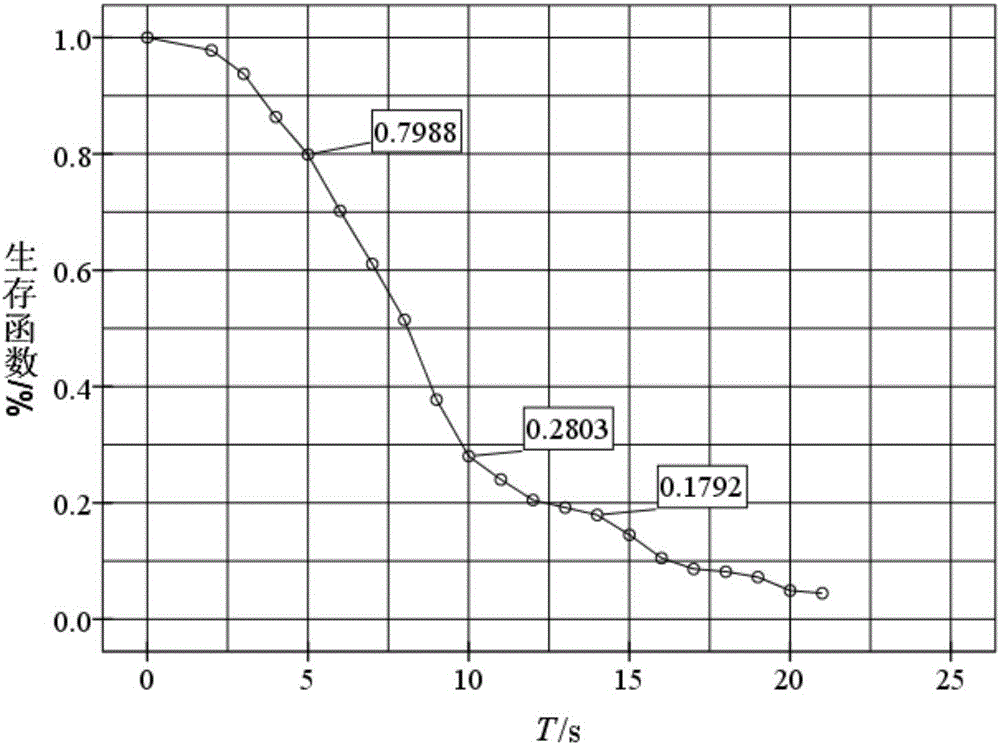
[0019] Among them, t means that the lane change has been carried out to the tth second, and the survival function of the target vehicle’s lane change duration T represents the probability that the lane change duration is greater than t, and the specific expression is
[0020]
[0021] Lane changing starts from the lateral displacement of the vehicle. When the lane changing time T has lasted to t, the instantaneous possibility of it completing the lane changing process and driving to the centerline of the target lane within the time Δt is represented by h(t), which is The risk function of the lane change duration T is expressed as
[0022...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More