

Precise positioning and ranging method for suspended track unmanned vehicle based on UWB and DGPS technologies
An unmanned vehicle and GPS positioning technology, applied in the field of precise positioning and ranging of suspended track unmanned vehicles, can solve the problems of single, unable to locate, unable to complete positioning, etc., and achieve the effect of enhancing anti-interference.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
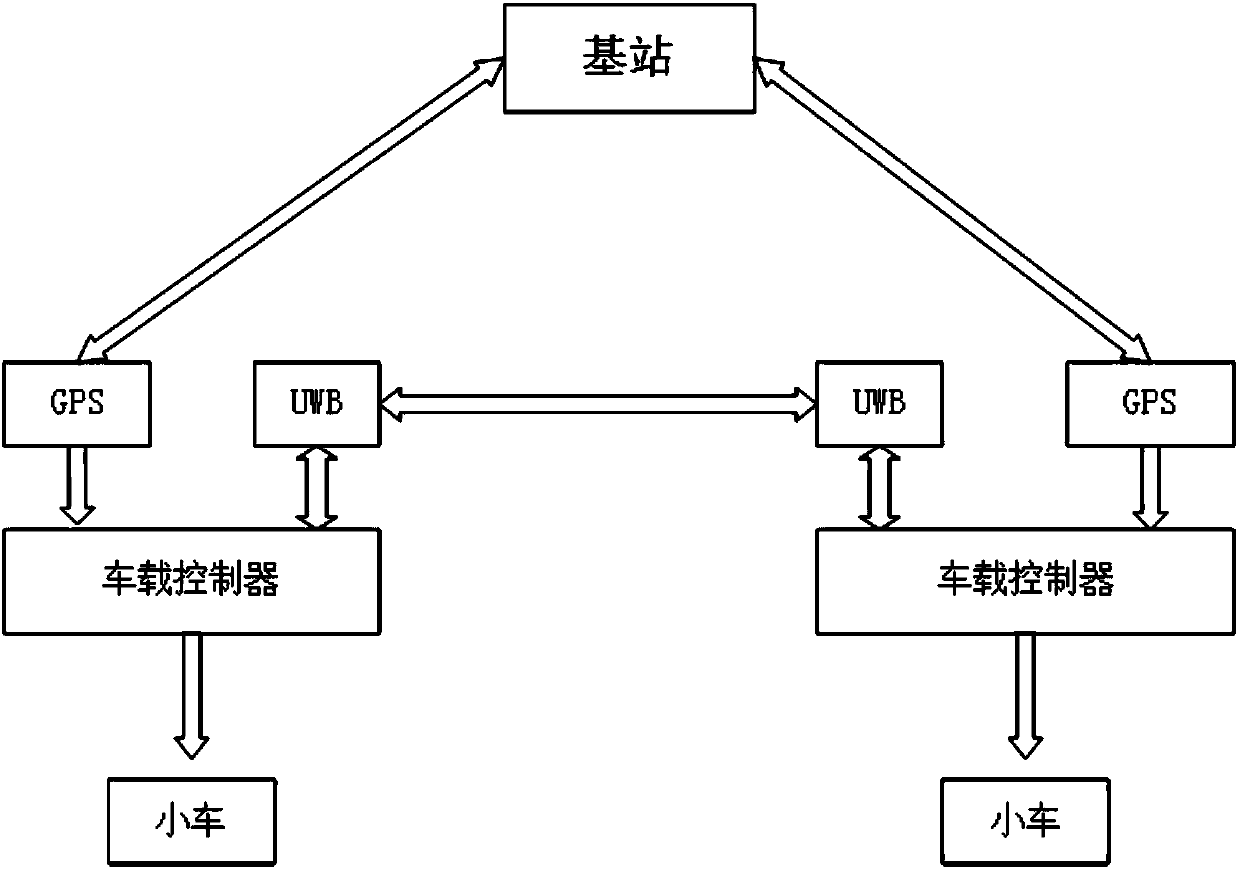
[0016] Such as figure 1 As shown, a method for precise positioning and ranging of a suspended track unmanned vehicle based on UWB and DGPS technology includes the following steps:
[0017] (1) Install the DGPS system and the UWB positioning and ranging system on the unmanned vehicle. Both the DGPS system and the UWB positioning and ranging system are connected to the vehicle control system. The vehicle control system performs vehicle positioning and measurement through the DGPS system and the UWB positioning and ranging system. Distance and unmanned driving;
[0018] (2) The vehicle-mounted GPS and the base station constitute DGPS, which can obtain sub-meter positioning accuracy under the condition of satellite signals. The GPS positioning information is sent to the UWB through the vehicle-mounted controller, and the UWB communicates with each other between two vehicles on the same track. The on-board controller calculates the distance between the vehicles according to the GP...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More