

Head-eye coordinated movement device for humanoid robot
A humanoid robot and coordinated movement technology, which is applied in the field of humanoid robots, can solve the problems of high price, abnormal size, poor head movement flexibility, etc., and achieve the effect of improving movement flexibility and action coordination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Preferred embodiments of the present invention are described in detail as follows in conjunction with accompanying drawings:
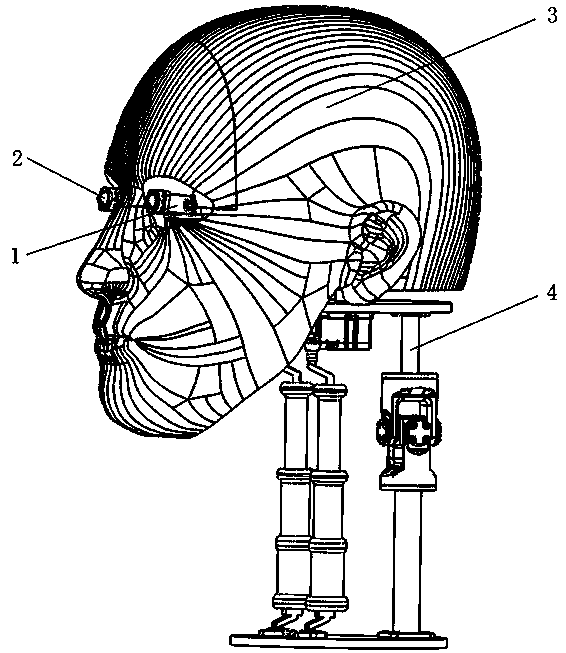
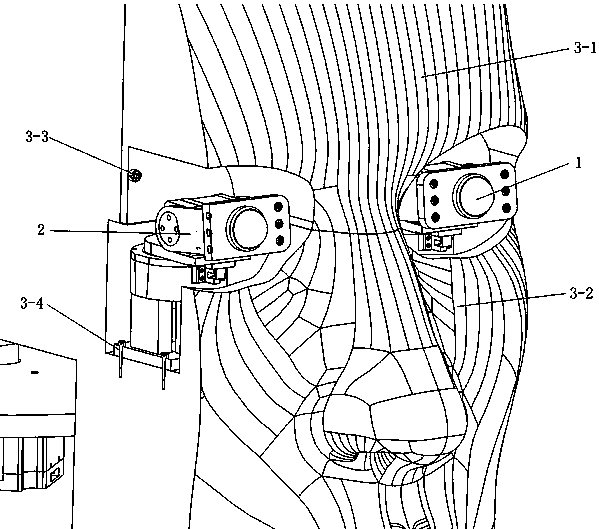
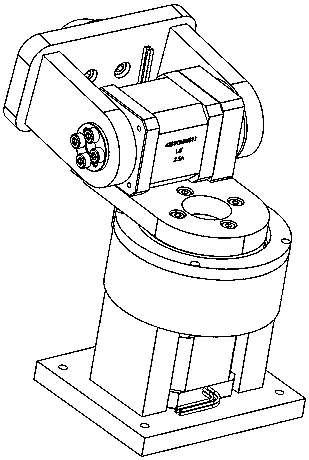
[0020] like figure 1 and figure 2 As shown, a head-eye coordinated movement device for a humanoid robot is composed of two eye movement mechanisms 1, 2, a head-shaped shell 3 and a neck movement mechanism 4; the two eye movement mechanisms 1, 2 are installed at the two eye positions of the head-shaped shell 3, and the neck movement mechanism 4 is installed under the head-shaped shell 3. The head-shaped shell 3 is composed of a forehead shell 3-1 and a head body 3-2 connected by screws 3-3.
[0021] like image 3 , Figure 4 and Figure 5 As shown, the two eye movement mechanisms 1 and 2 have the same structure, and are respectively installed on the two eye positions of the head-shaped housing 3 by screws 3-4, wherein the eye bottom plate 1-1 of the eye movement mechanism 1 is connected to the The head main body 3-2 is connected by screws ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More