

Travelling mechanism of track inspection robot
A technology for inspection robots and walking mechanisms, applied in the directions of manipulators, manufacturing tools, etc., can solve the problems of difficult turning and climbing, difficult precise positioning, and high rack cost, achieve precise positioning, achieve positioning, and meet the needs of small radius turns Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with accompanying drawing:
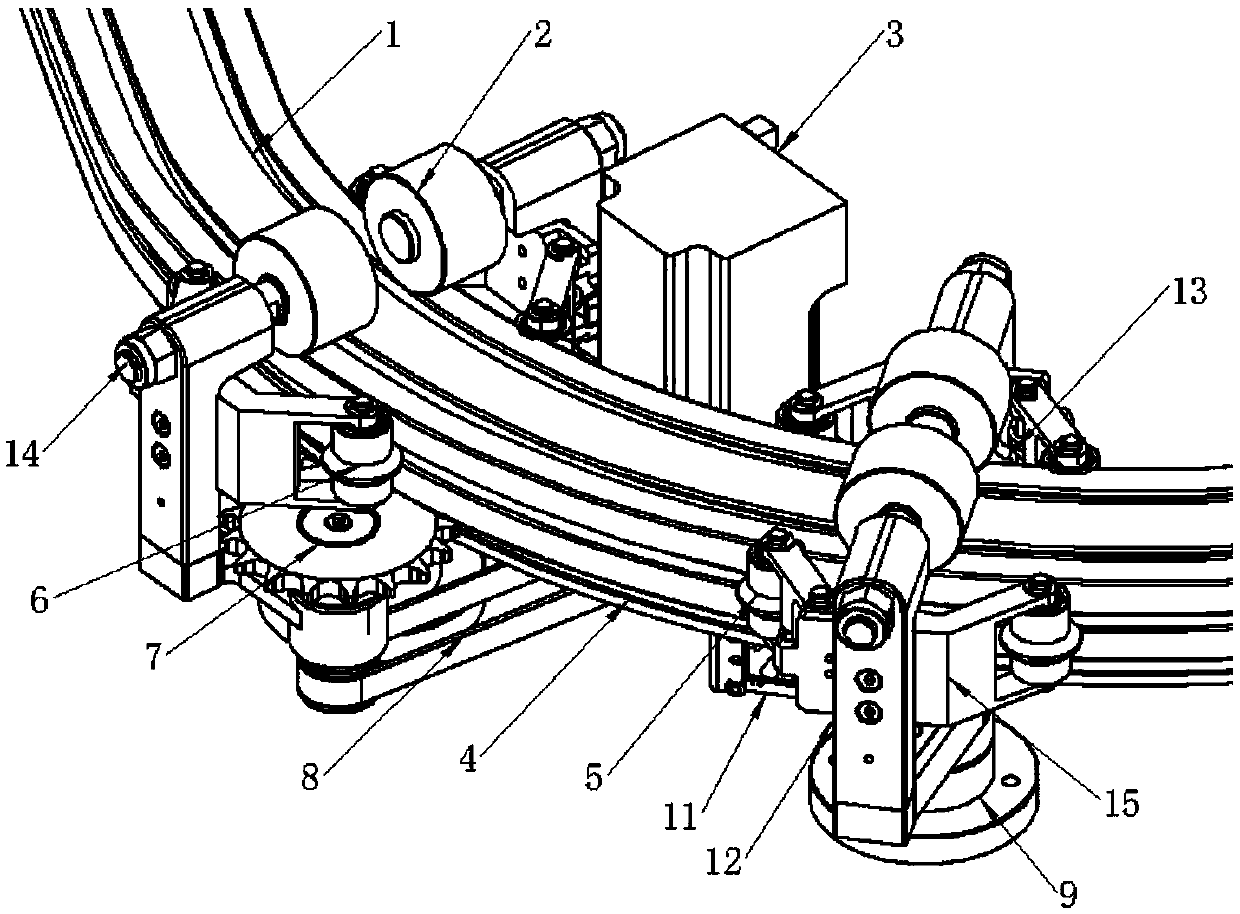
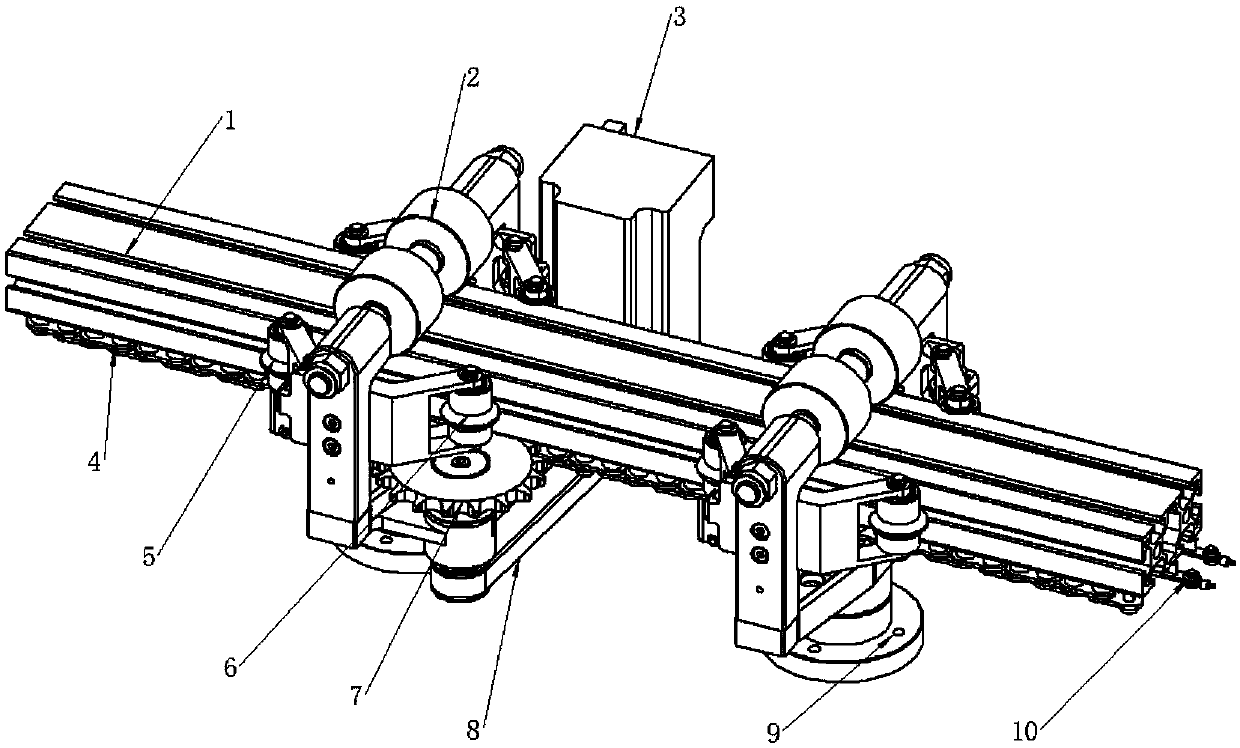
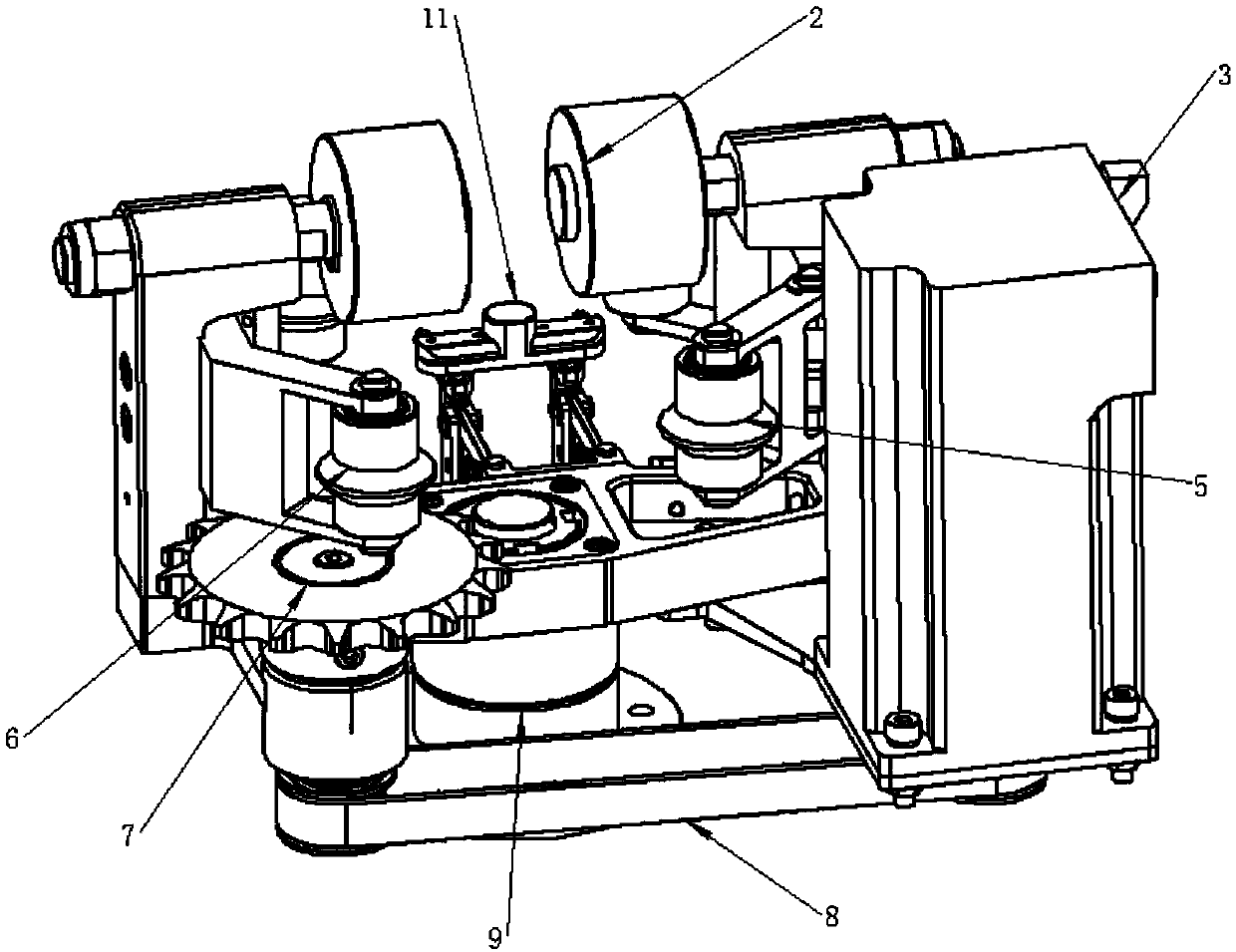
[0024] Such as figure 1 , figure 2 and image 3 As shown, a track inspection robot walking mechanism of the present invention includes a track, a drive mechanism and a power supply device, the drive mechanism moves along the track, and the inspection robot is installed on the drive mechanism;
[0025] The track includes an aluminum profile 1 and a chain 4, and the chain 4 is arranged below the aluminum profile 1 in parallel and is fixedly connected to the lower side of the aluminum profile 1;
[0026] The driving mechanism includes a suspension arm 12, a crossbeam, a stable wheel set, a sprocket 7, a drive motor 3 and a steering device 9. Two suspension arms 12 and the crossbeam form a U-shaped structure, and the aluminum profile 1 is located in the U-shaped structure, and the suspension arm 12 The stable wheel set is in sliding contact with the aluminum profile 1, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More