

Vision positioning method and system based on low-precision GPS in automatic driving
A visual positioning and automatic driving technology, applied in satellite radio beacon positioning system, radio wave measurement system, measuring device, etc., can solve problems such as positioning drift and high cost of high-precision inertial navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention and are not intended to limit the invention.
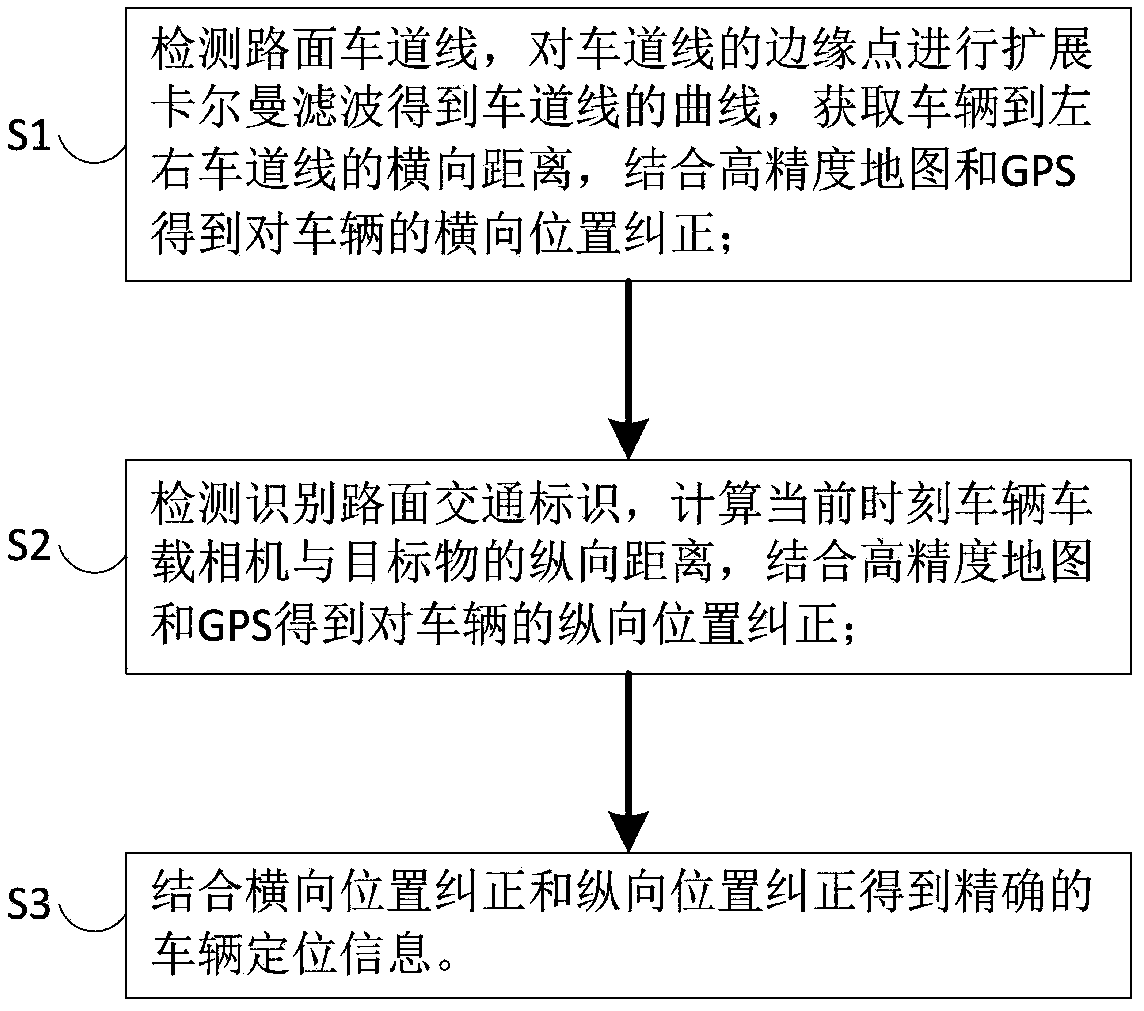
[0019] Embodiments of the present invention provide a visual positioning method combined with low-precision GPS in automatic driving, such as figure 1 As shown, the visual positioning method combined with low-precision GPS in the described automatic driving comprises the following steps:
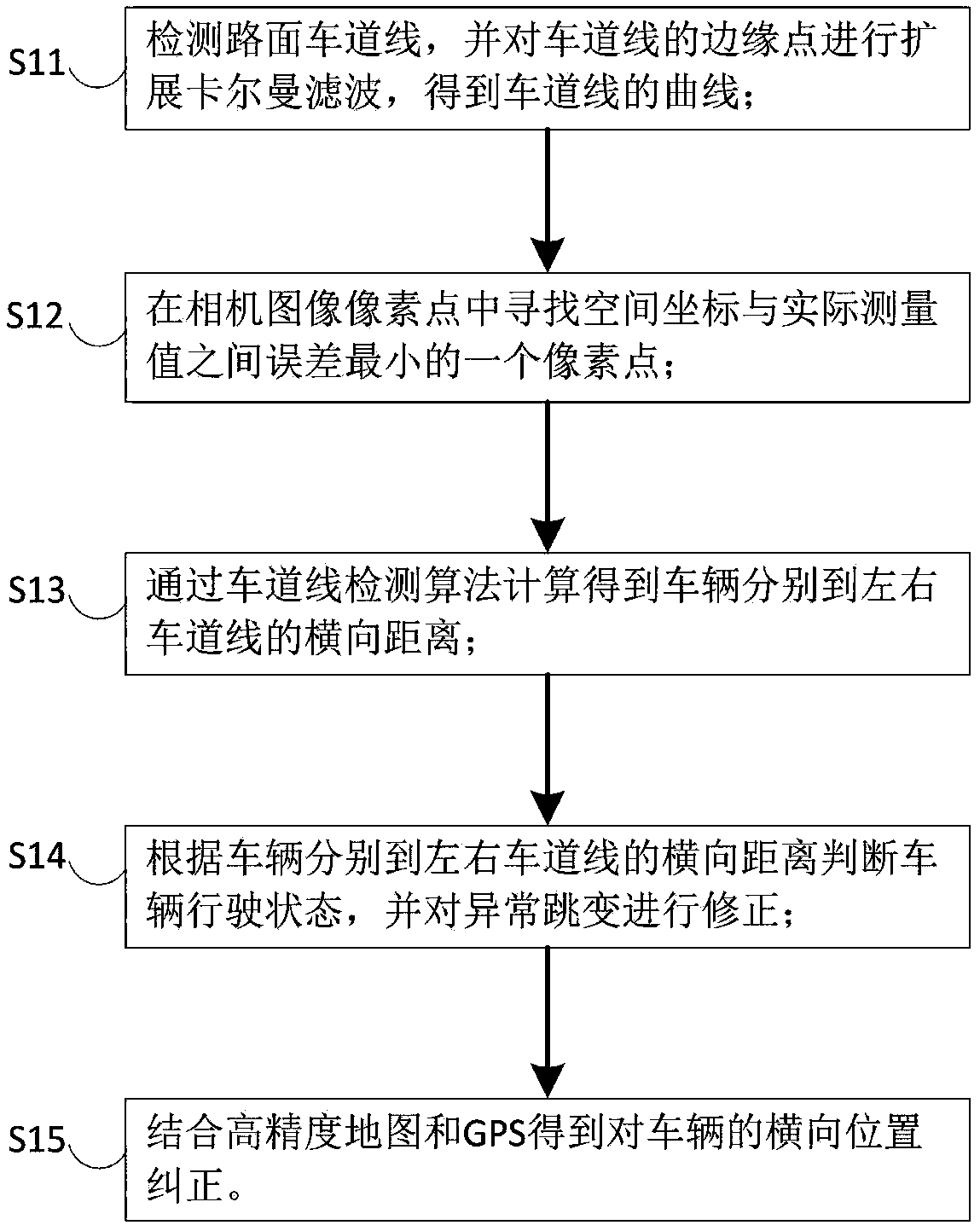
[0020] S1. Detect road lane lines, perform extended Kalman filter on the edge points of the lane lines to obtain the curve of the lane line, obtain the lateral distance from the vehicle to the left and right lane lines, and combine high-precision maps and GPS to correct the lateral position of the ve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More