

Robot path planning method based on data fusion of single-line lidar and binocular camera
A technology of single-line laser radar and binocular camera, which is applied to instruments, surveying and navigation, road network navigators, etc., can solve the problems of high price and inapplicability of 3D laser radar, and achieve good real-time performance, low power consumption, and method simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
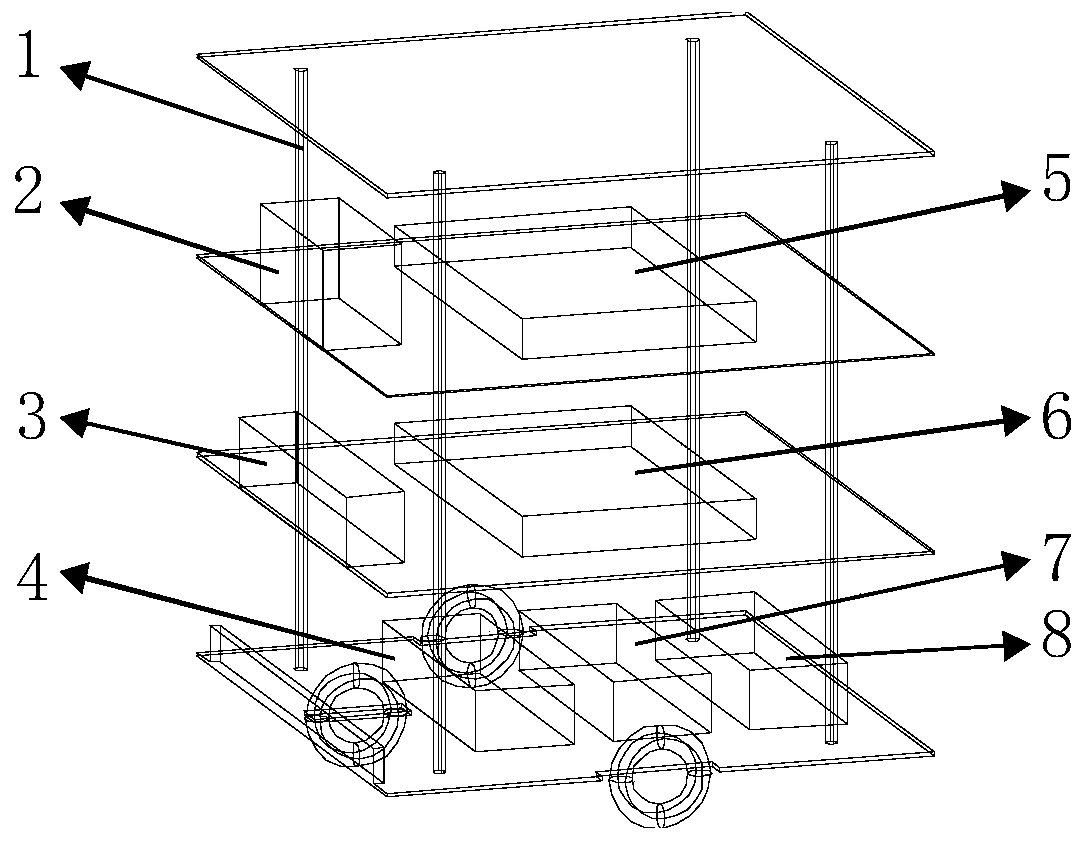
[0038] combine figure 1 , in order to realize a robot path planning method based on single-line laser radar and binocular camera data fusion in this embodiment, a robot equipped with 2D laser radar and binocular camera is designed. Built as a whole, the 2D laser radar 2 and the binocular camera 3 are placed on the central axis of the mobile robot. The robot is equipped with HCR robot platform 4, bottom motion controller 5, development board 6 (JETSON TX2 development board), main controller 7 and wireless network card 8 at the same time.
[0039] In this embodiment, the mobile robot uses 2D laser radar and binocular camera fusion on the basis of SLAM to complete the construction of accurate dense point cloud, thereby completing the path planning of the mobile robot.
[0040] The SLAM algorithm is the basis of this embodiment. Accurate SLAM dense point cloud construction plays an important role in the later data fusion. However, this embodiment uses binocular vision SLAM, so th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More