

Method for obstacle avoidance of fusion of a plurality of data weights, storage device and mobile terminal
A technology of weight and data, applied in the field of robotics, can solve the problems that robots cannot do autonomous motion planning, etc., and achieve the effect of autonomous obstacle avoidance, flexibility and intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
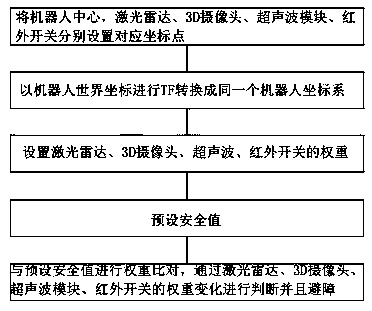
[0024] Such as figure 1 As shown, a method for fusion of multiple data weights in this embodiment for obstacle avoidance is characterized in that the method includes:
[0025] A. Set the robot center, laser radar, 3D camera, ultrasonic module, and infrared switch to the corresponding coordinate points;
[0026] B. Use the robot world coordinates to perform TF conversion into the same robot coordinate system;
[0027] C. Set the weight of laser radar, 3D camera, ultrasonic module, and infrared switch;
[0028] D. Preset safety value;
[0029] E. Compare the weight with the preset safety value, judge and avoid obstacles through the weight changes of the laser radar, 3D camera, ultrasonic module, and infrared switch.
[0030] Preferably, the lidar data is data on a 2D plane.
[0031] Preferably, the point cloud data weight of the 3D camera is α, the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More