

Underwater robot and control method using somatosensory control
A technology of underwater robot and somatosensory control, which is applied in the direction of underwater ships, non-electric variable control, height or depth control, etc. Equipment cost, the effect of simplifying the mechanical structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] Below in conjunction with accompanying drawing and specific embodiment, the underwater robot of the present invention is described in detail:
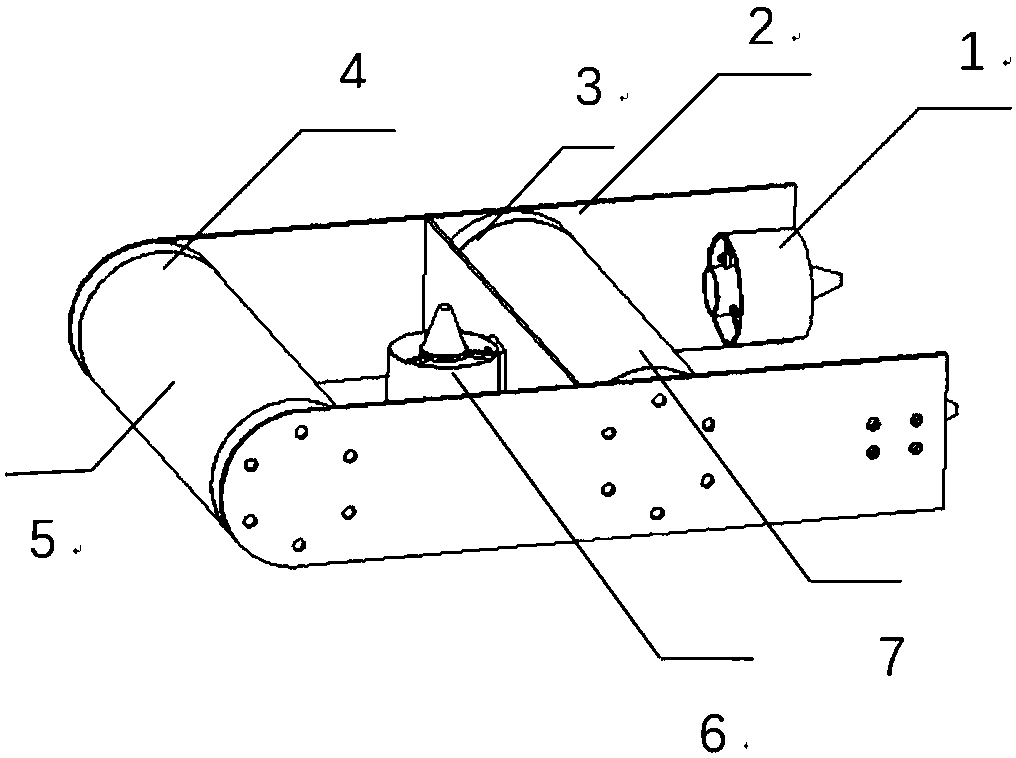
[0037] An embodiment of the present invention is an underwater observation robot, such as figure 1 As shown, it includes a robot main body and an underwater robot control system; the underwater observation robot main body includes: a skeleton 2 constituting the main structure of the robot, with a front waterproof cabin 4 and a rear waterproof cabin 3, and the front and rear waterproof cabins 4 , 3 is provided with a vertical direction propeller 6, is provided with a horizontal direction propeller 1 behind the rear waterproof cabin 3, and the horizontal direction propeller 1 can be driven in two directions forward and backward; The control system of the underwater robot includes an underwater Underwater observation robot motion control system, image acquisition device, information transmission device; the underwater observation r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More