

A Distributed Task Scheduling Method for UAV Swarm in Dynamic Environment
A technology of distributed tasks and scheduling methods, applied in the field of distributed task scheduling of UAV swarms, can solve problems such as the inability to implement tasks in UAV swarms, the complexity of environmental collaborative control, and mission failures.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described in detail below in conjunction with the drawings and specific embodiments.
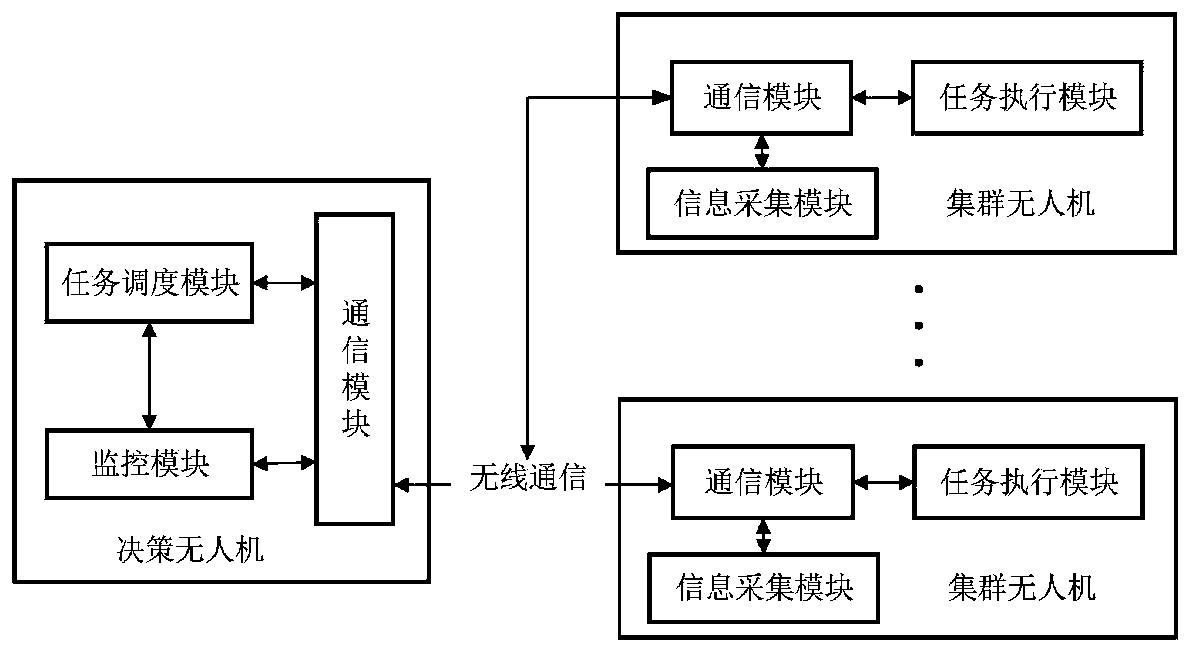
[0029] Reference figure 1 , The scheduling system applicable to the present invention includes a decision-making UAV and multiple cluster UAVs.
[0030] Decision UAV includes communication module, monitoring module and task scheduling module. The communication module is used to transfer information between the decision-making UAV and the cluster UAV, including the task scheduling plan issued by the decision UAV and the planned flight path, the task execution status of the cluster UAV, flight position information, endurance and acquisition The mission target information; the monitoring module is used to collect the data obtained by the communication module, and monitor the status and mission status of each cluster drone, including the flight position and endurance of each cluster drone, the current number of missions, the mission target location and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More